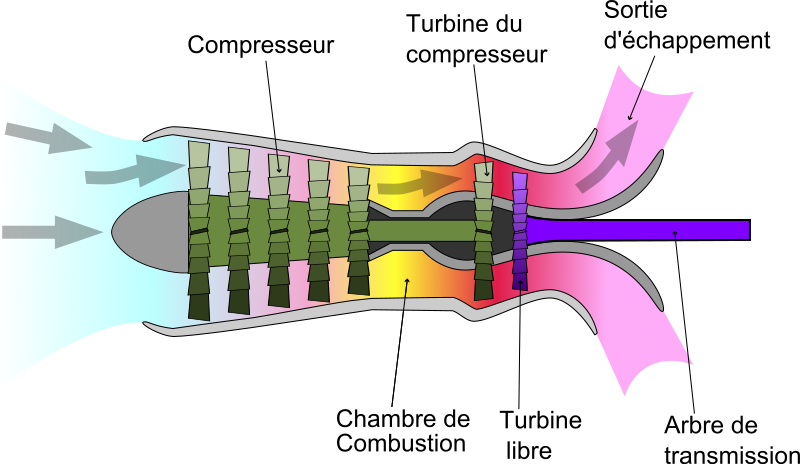
Sur un turbomoteur l’énergie produite par la combustion est récupérée par les turbines car une poussée en sortie serait néfaste au maintien du vol stationnaire. L’évacuation des gazs ce fait donc de deux échappements de directions opposées, afin d’annuler leurs effets sur le vol.
L’énergie récupérée par les turbines sert à entraîner le compresseur et par un réducteur, le rotor. Ce dernier est équivalent à une hélice dont le plan de rotation serait horizontal. Ces moteurs sont donc ceux des hélicoptères.
II/Le turbopropulseurLe turbopropulseur est un réacteur dont la turbine entraîne une hélice. Il fonctionne de la même manière que le turbomoteur mais n’as qu’une sortie d’échappement et entraîne une hélice verticale. C’est un donc un moteur pour avions.
III/Le turboréacteurLe turboréacteur est un moteur utilisé pour les avions. La pousée qu’il produit résulte de l’accélération de l’air entre l’entrée et la sortie , par la combustion d’un carburant (le kérosène). Une partie de l’énergie produite est récupérée par une turbine a la sortie de la tuyère qui sert à faire tourner le compresseur en entrée. Ici le rôle de l’hélice est jouer par la soufflante.
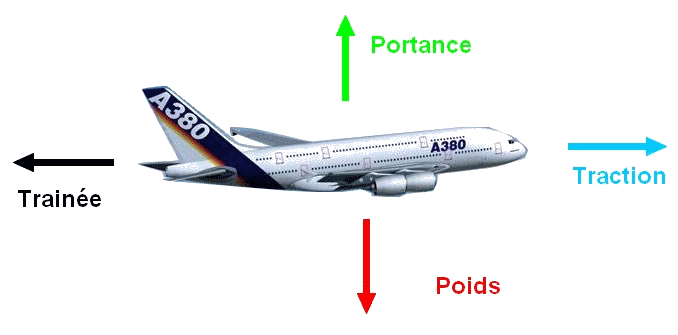
Toutes les forces s’appliquent au centre de gravité de l’avion or en vol rectiligne uniforme sa trajectoire est une droite et sa vitesse est constante, donc la somme des forces s’appliquant au point G est nécessairement nulle : ΣF=O.
Phénomènes physiques qui exercent une influence sur le déplacement de l’avion en vol.
La portance
C’est une force, aussi appelée sustentation, dirigée du bas vers le haut. Elle est opposée au poids de l’avion et doit lui être au moins égale pour que l’avion s’élève. Elle résulte de la pénétration dans l’air de l’aile.
Une aile d’avion est telle que l’air doit parcourir une distance supérieure sur le dessus de l’aile (Dépression).
L’écoulement de l’air sur la partie supérieure de l’aile (Extrados) est plus rapide que celui de la partie inférieure (Intrados). Cela est dû au profil de l’aile, bombé sur le dessus. Il en résulte une pression plus faible sur l’extrados et donc une aspiration vers le haut. La sustentation est générée principalement par l’extrados.
L’angle que forme l’aile avec la couche d’air qu’elle traverse (appelé angle d’incidence) agit sur la portance de l’aile. Plus celui ci augmente, plus la portance augmente. Mais cela jusqu’à un certain point. Au delà, l’aile décroche brutalement et perd sa portance.
La traînée
C’est la force opposée au déplacement de l’avion et qui résulte de sa résistance à l’air . C’est la résistance à l’avancement, on cherche donc à la réduire au maximum.
La traînée est la résistance de l’air sur l’aile.
Le corps fuselé est le mieux adapté pour diminuer la résistance à l’air. En effet, la zone de dépression est comblée, les tourbillons sont nuls, et les filets d’air se rejoignent. Le coefficient de de résistance est très faible.
Le Poids.
Cette force est celle contre laquelle lutte la portance pour maintenir l’avion en l’air.
C’est une force qui agit sur la masse totale de l’avion. Elle s’applique en un point: le centre de gravité. Elle est dirigée vers le centre de la Terre et s’exprime en Newton.
C’est contre cette force que l’avion doit lutter pour s’élever dans les airs. Pour que l’altitude soit constante, il faut que la valeur de la portance soit égale à celle du poids. Le poids joue aussi un rôle dans le choix des matériaux et dans la structure de l’avion car la voilure et le fuselage subissent des efforts importants.
Traction.
Elle provient des moteurs par l’intermédiaire de l’hélice. Si l’avion a des réacteurs, c’est la poussée de ceux ci qui équilibre la traînée. Une hélice imprime à une masse d’air une accélération vers l’arrière et elle reçoit à son tour une force dirigée vers l’avant: c’est la traction et l’avion est propulsé vers l’avant. Lors du décollage, l’aile rencontre l’air chassé par l’hélice, et il commence à y avoir une portance.
L’homme sait marcher, l’homme sait nager, mais l’homme ne sait pas voler. Pour y parvenir, il a imaginé diverse machines volantes. Nous allons étudier l’hélicoptère et l’avion.
Comment vol l’avions et l’hélicoptère, et quel sont les solutions technologiques apporté pour y contribuer ?
Nous allons nous intéresser, dans cet article, à la mécanique du vol.
L’avions.
Pour voler, l’avion utilise sa voilure (ailes). Celle-ci sont bondé sur le dessus et non symétrique. Le principe consiste à accélérer l’air au dessus de l’aile, à crée une dépression sur le dessus, et une surpression sur le dessous, et donc de la portance.
Schéma explicatif sur l’origine de la portance d’une aile d’avion. (http://0320408577.free.fr/schema%20portance.bmp)
L’avions, pour créer cette portance, doit également avoir un vent relatif, qu’il se créer grâce à ses moteurs, allant du moteur à piston à hélice pour les avions Touriste, jusqu’au Turboréacteur des avions de chasse ou de ligne.
L’angle d’incidence, joue également un rôle dans la portance de l’avion. Attention, si cette angle d’incidence est trop grand, l’avion risque de décrocher et donc de chuter.
Schéma coupe d’une aile avec en représentation les forces exercé sur l’aile avec l’angle d’incidence. (http://idata.over-blog.com)
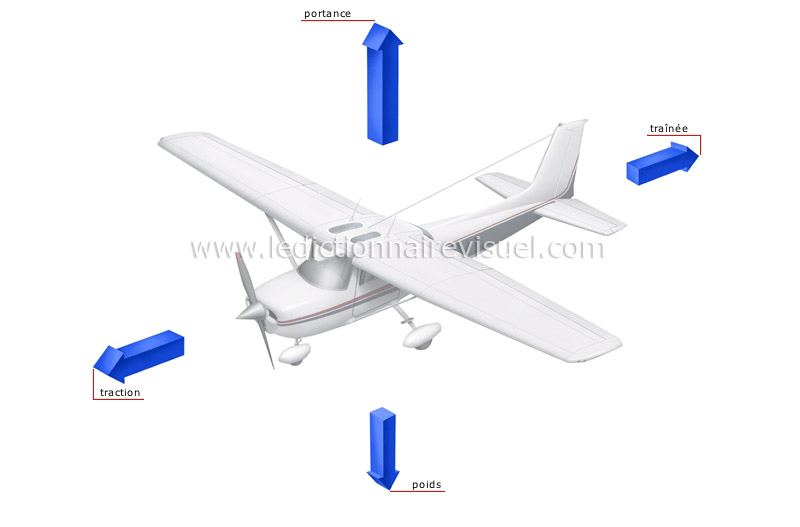
Pour se diriger, l’avion pivote autour de 3 axes de translation et 3 axes de rotation, grâce à des gouvernes et ailerons, les volets, servant en fasse d’atterrissages.
3 Rotation possible:
Axe de Lacet : Gouverne de direction
Axe de Tangage : Gouverne de profondeur
Axe de Roulis : Ailerons latéraux
Schéma de représentation des axes de rotation d’un avion type Cessna (http://www.lavionnaire.fr)
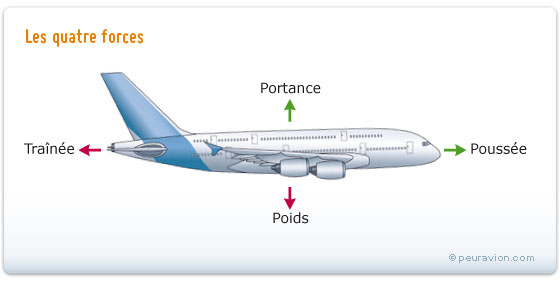
En vol, plusieurs forces s’exercent sur l’avion : Le poids, la portance, la trainer, la traction.
Le poids : Il est dû à l’attraction terrestre. Cette force est dirigée vers le bas, toujours vers le centre de la terre, ce qui aura des impacts non négligeables lors de phase de décollage et d’atterrissage.
La portance : Elle est due à la dépression et la surpression sur les voilures de l’avion. Cette force s’oppose au poids.
La trainer : Elle est provoquée par la résistance aérodynamique d’un fluide sur un objet en mouvement. On la rencontre aussi bien sur une automobile qu’un avion. Elle a un impact lors des déplacements de l’avion.
La traction : est créé grâce aux moteurs de l’avion, qui généré un vent relatif, qui maintient grâce à la portance, l’avion en l’air. Cette force s’oppose à la trainer.
Schéma résumant toute les forces exercé sur un avion. (http://jonathan.daubin.info)
Type de moyen de propulsion d’un avion
Les avions peuvent être équipés de différent type de moteurs. Prenons deux exemple parmi les plus courants:
Moteur à pistons : fonctionne sur le même principe qu’un moteur à combustion de voiture. Le mélange air comprimé et carburant est enflammé et avec la détente des gaz, repousse le piston, qui entraine un axe, qui entraine une hélice, qui tracte ou propulse l’avion.
Turboréacteur : fonctionne sur le principe action-réaction. L’air est aspiré par une soufflante qui joue le rôle d’une hélice. L’air, comprimé arrive en chambre de combustion, puis mélangé à du carburant (kérosène), puis éjecté à très grande vitesse, ce qui propulse l’avions. Les avions de lignes, sont équipés de turboréacteur à double-flux, ce qui permet de minimiser le bruit.
A la différence d’un avion, l’hélicoptère utilise une voilure rotatif, pour se crée une portance, ou un vent relatif. Le rotor en mouvement, constitué de pales, assure son déplacement et son maintien en l’air.
Les pales de l’hélicoptère, sont bombées symétriquement. Pour décollé, le pilote actionne le pas général pour orienter les pales, produire une portance qui soulève l’hélicoptère. Grâce à un système, l’articulation de battement, le pilote oriente les pales pour aller dans la direction souhaité.
Schéma force exercé sur un hélicoptère. (http://tpeaero.free.fr)
Mais le mouvement du rotor, engendre un nouveau problème. Le cockpit tourne lui aussi, mais dans le sens inverse du rotor.
C’est pour cela que les ingénieurs ont conçu le rotor de queue, afin d’annulé cette force responsable de la rotation du rotor et par conséquent, facilité la manœuvrabilité de l’hélicoptère.
Schéma représentant la force qu’exerce le rotor sur l’hélicoptère. (http://jeanpierre.rousset.free.fr)
Dans toutes les machines il y a des Forces qui s’exercent. Nous avons étudiez 2 cas différents, le cas d’un avion et celui d’un hélicoptère. Dans les 2 cas le vent relatif est utilisé.
L’avion:
Dans l’avion il y a différentes Forces, celles qui s’opposent au déplacement et celles qui aident au déplacement de l’avion. Ces Forces s’exercent sur les ailes de l’avion. Une de ces forces est le résultat de 2 forces, la force résultante, qui dépend de la Force de portance et la force de trainée que je vais expliquer ci-dessous.
Les Forces qui aident au déplacement de l’avion:
Dans toutes machines il y a une Force motrice qui est une Force créé par un moteur, cette Force est plus connu en aviation sous le nom de poussée. Elle permet de créer au moment du décollage une Force de portance à l’aide de volet qui s’incline pour décoller. Cette portance est perpendiculaire au vent relatif. La poussée permet de faire avancer l’avion et la portance permet de faire voler l’avion sans qu’il ne chute.
Les Forces qui s’opposent au déplacement de l’avion:
Dans les Forces qui s’opposent il y a bien sur le Poids de l’avion (Poids= masse*gravité) comme vous pouvez le voir dans le poids il y a de facteur, la masse de l’appareil mais aussi la gravité c’est pour cela que le poids s’oppose en attirent l’avion vers le sol. Ensuite il y a une Force lié à l’aérodynamisme ce n’est autre que la Force de trainée.
Force exercé sur les ailes source: upload.wikimedia.org
L’hélicoptère:
Les forces exercé sur un hélicoptère sont divisé en 2 comme pour l’avion. Un hélicoptère contrairement à un avion n’a pas d’aile ni de gouvernes.
Les Forces qui aident au déplacement:
Il y a comme dans un avion la Force de portance qui fait décoller l’hélicoptère. Il y a une force de portance sur chaque pâle. Si un hélicoptère n’a pas de force de trainé alors l’ensemble des forces de portance est appelé force résultante. Pour se déplacer il y a accélération qui se rajoute.
Les Forces qui s’opposent au déplacement:
Le poids comme dans toutes objets s’opposent au déplacement et est opposé à la force de portance. Lors d’un déplacement la force de trainé intervient.
Vol stationnaire source:upload.wikimedia.org
Hélicoptère qui avance source:upload.wikimedia.org
Sur l’aile d’un avion, s’exerce plusieurs forces tel que la force de traînée (parallèle à la vitesse de l’air), la force de portance (perpendiculaire à l’air) et une force résultante qui est la somme vectorielles de ces deux forces.
La portance
La force de portance, aussi appelée sustentation qui à pour centre un point de l’aile. Cette force, s’oppose au poids de l’avion.
La portance
Profil de l’aile
L’air à une vitesse plus importante sur la surface supérieure de l’aile qu’à la surface inférieure car l’air doit parcourir une distance plus grande en mettant autant de temps que l’air qui passe sous la partie inférieure de l’aile. Le profil de l’aile joue beaucoup sur la portance (force de portance verticale).
La vitesse par rapport au profil de l’aile
La portance d’un avion dépend de sa vitesse. Par exemple il faut une portance suffisamment élever pour pouvoir décoller, il faut donc que l’avion ait une vitesse de sustentation (=portance) minimale.
Angle d’incidence
Plus l’angle d’incidence augmente plus la portance augmente.
La traînée
C’est une fore qui s’oppose au déplacement de l’avion (=résistance à l’air). Plus la vitesse augmente, plus la traînée est importante.
La poussée est la force exercée par l’accélération de gaz (souvent de l’air) grâce à un moteur dans le sens inverse de l’avancement.
Dans le cas d’un avion, la poussée lui permet d’avancer.
Les 4 forces ( source PeurAvion.com)
Au décollage elle permet l’accélération de l’avion. Le pilote ne met les volets en position décollage qu’une fois la vitesse de décollage atteinte cela crée alors une portance supérieure au poids qui permet à l’avion de décollé. Il ne le fait pas avant pour diminuer la traînée et permettre une prise de vitesse rapide. Il décolle le plus souvent possible face au vent pour augmenter le vent relatif. Il réduit ainsi la vitesse et la distance de décollage.
En vol de croisière la poussée compense la force de traînée liée aux frottements aérodynamiques sur l’aile et le reste de l’avion, en augmentant la poussée il peut accélérer et augmenter sa portance et donc son altitude.
Dans le cas d’un hélicoptère la poussée lui permet de décoller et d’avancer.
Le rotor crée un flux d’air vertical qui assure à la fois la portance et la propulsion.
Les 4 forces vue d’un hélico ( source helikopter83.free.fr)
Poussée d’un hélicoptère ( source lapband.free.fr)
Poussée = Fm = Δm/Δt.(Vs – Ve)
Fm la Force motrice, Δm/Δt le débit massique du flux d’air traversant le rotor (en kg/s), Ve la vitesse de l’air au dessus du rotor, et Vs sous le rotor.
La poussée est perpendiculaire au rotor.
Cette poussée peut aussi se modéliser comme étant la portance d’ailes tournantes.
Cette poussée assure la sustentation (portance d’une aile pour un avion) mais elle peut permettre aussi la propulsion (hélice ou réacteur d’un avion) et le pilotage.
Nous avons essayer plusieurs cas pour l’AR.Drone. Au tout début nous avons regarder le fonctionnement de l ‘AR.Drone avec l’aide de la doc constructeur et à partir de cela nous avons écrit un protocole expérimental. Avant de mettre en route l’AR.Drone nous avons choisi un lieux ou il n’avait pas d’obstacles et on a mis en place un périmètre de sécurité. Après nous avons mis la batterie et nous avons allumer l’AR.Drone que cela à fait une phase d’auto-test pour voir se tout fonctionner parfaitement.
Les cas étudies :
1 – Nous avons essayer de voir si l’AR.Drone décolle sur l’herbe.
Observation : cela a décoller mais parce qu’on a fait le premier essayer sur de l’herbe que était petit parce que quand on l’a essayer sur de l’herbe un peu plus grand il n’a pas décoller parce que l’herbe ne laisser pas tourner les hélices. Le décollage au début c’est un décollage automatique jusqu’à une certaine hauter.
2 – Nous avons regarder l’autonomie de l’AR.Drone avec l’aide d’un chronomètre (portable d’Artur).
Observation : après avoir utiliser l’AR.Drone entre six et sept minutes il reste que quinze pour-cent de la batterie. À la fin la batterie était juste un peu chaud donc il y a des pertes.
3 – Nous avons essayer de faire atterrir l’AR.Drone sur des boites en plastiques et pour cela nous avons utiliser la carène intérieur pour protéger les hélices.
Observation : à partir de cela nous avons vu que c’est ne pas très pratique de le faire atterrir sur les deux boites avec la tablette mais qu’il est possible et pendant que on l’a utiliser nous avons vu que la carène intérieur est très efficace en cas de collision avec un objet et même en cas de crash (difficile de contrôle l’AR.Drone avec la tablette).
4 – Nous avons voulu voir comment l’AR.Drone se comporter face à une perturbation naturelle comme par exemple le vent. Pour cela nous allons mettre l’AR.Drone face au vent et on le fera décoller pour regarder son comportement.
Problèmes rencontres : il y avait peu de vent.
Observation : il dérive très peu parce qu’il avait peu de vent.
5 – Nous avons voulu essayer aussi jusqu’à quelle distance le wifi de l’AR.Drone aller fonctionner.
Problèmes rencontres : On avait encore très peu d’expérience a contrôler l’AR.Drone et parce qu’on n’avait pas assez de temps.
Conclusion
D’autre hypothèse d’essayer
1 – Essayer de voir comment se comporte l’AR.Drone dos au vent?
2 – Essayer de voir comment se comporte l’AR.Drone face a un vent plus forte?
3 – Essayer de voir comment il fait pour se rééquilibre face a une rafale de vent?
4 – Essayer de voir son comportement s’il a un cote plus lourds que l’autre?
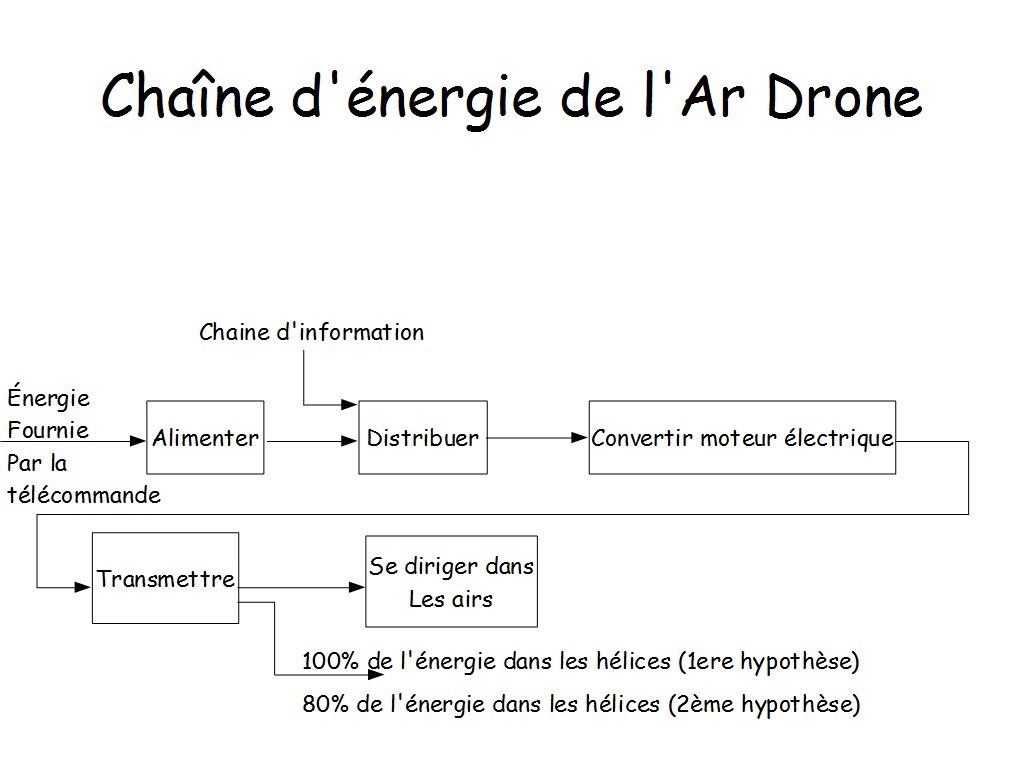
Pmassique= P/m= 152/0,44= 345 W/kg P=Puissance en Watt (W)
m=masse en kilogramme (kg)
Couple de l’AR.Drone:
Nous considérons que 100% de la puissance est transmise aux hélices.
P= C*w donc C= P/w P= Puissance en W
C= Couple en Nm
w= Vitesse de rotation en tr/min
En regardant les caractéristiques des hélices nous avons trouvé la vitesse de rotation de celle-ci, 3300tr/min.
C1= P100%/w= 152/(3000*2π/3600)= 29Nm
Nous considérons maintenant les autres composants qui demandent de la puissance et nous mettons comme hypothèse le fais qu’il y a 80% de la puissance qui est transmise aux hélices.
P80%=152*0,8= 122 W
donc C2= P80%/w= 122/(3000*2π/3600)= 23Nm
Autre possibilité de calcule: C2= C1*0,8=23Nm
Les réducteurs:
La vitesse de rotation des moteurs pour un vol stabilisé est de 28000tr/min (environ 30000tr/min).
Entre les moteurs et les hélices, il y a donc des réducteurs qui permettent de diminuer la vitesse de rotation et qui augmentent le Couple pour que la puissance reste la même.
Rapport: wmoteurs/ whélices= 30000/3000= 10.
Grâce aux réducteurs le couple est multiplier par environ 10.
Le frein rhéostatique est un système de freinage électrique permettant de changer le mode de fonctionnement des moteurs de tractions en leur faisant jouer le rôle de générateur, dans le but de récupérer l’énergie.
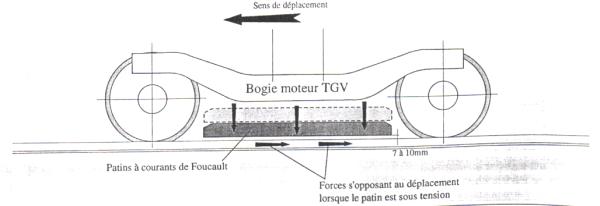
Freins à courants de Foucault
Le frein à courant de Foucault est un électroaimant, il fonctionne grâce à des courants électriques créant un champ magnétique. Il joue un rôle de ralentisseur.
Freins à courants de Foucault
Le frein à sabot
Frein à sabot
Il est constitué d’une pièce mobile, le sabot, qui vient s’appliquer sur la roue ou un dispositif qui en est solidaire. Il est encore employé dans les transports ferroviaires.
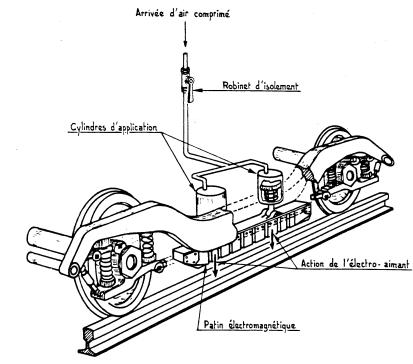
Le frein magnétique
Le frein magnétique est utilisé pour accroître l’effort de freinage. Il est utilisé en complément du freinage pneumatique et, dans certains cas, en complément du freinage dit « électrique »
Ce système n’est utilisé que pour les freinages d’urgence car il est nécessaire d’arrêter le train sur une distance la plus courte possible.
Les roues des TGV fonctionnent comme toutes celles des véhicules à roues.
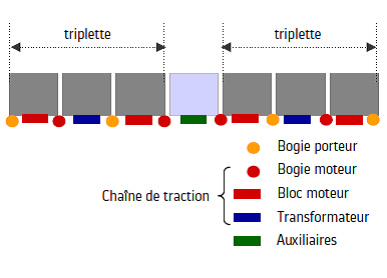
Une rame T.G.V. est supportée par treize bogies:
– six bogies moteurs, – sept bogies contenant le système de freins à disques.
Deux voitures intermédiaires successives sont supportées à leur extrémité commune par un bogie unique.
Toutes les roues supportent le trains et transmettent l’effort de freinage, d’autres (celles des bogies moteurs) font en plus avancer le train en transmettant l’effort de traction.
Un bogie moteur comporte :
– un bâti mécano-soudé,
– deux essieux en liaison avec le bâti par la suspension primaire,
– deux chaines de transmission de puissance constituées chacune par:
• un moteur électrique,
• un réducteur moteur,
• une ligne d’accouplement,
• un réducteur de pont entraînant l’essieu moteur.
Cette image me permet d’illustrer mes propos, vous pouvez voir toutes les parties principale du bogie. http://barreau.matthieu.free.fr
Qu’es-qu’un essieu ?
Un essieu de TGV est constitué d’un axe en acier sur lequel les roues monoblocs en acier sont emmanchées à force. En conséquence, un essieu complet constitue un ensemble indéformable, les 2 roues tournent donc à la même vitesse.
Pour supporter le train, l’essieu tourillonne* sur des roulements, à rouleaux, placés dans des “boîtes d’essieu”, une boîte à chaque extrémité de l’essieu. Le train repose sur ces boîtes par l’intermédiaire de deux étages de suspension. C’est-à-dire qu’entre l’essieu et le voyageur installé en voiture, il y a une suspension entre la boîte d’essieu et le châssis du bogie, puis une seconde suspension entre le châssis du bogie et la caisse de la voiture TGV. Le ressort de cette seconde suspension était métallique sur les rames TGV de 1° génération, il est maintenant pneumatique.
L’effort fourni par le moteur est transmis à l’essieu par l’intermédiaire de cardans afin que le moteur puisse être suspendu par rapport à l’essieu. Le moteur est fixé, soit à la caisse de la motrice (2 étages de suspension) soit au châssis de bogie (1 étage de suspension).
L’architecture du réducteur moteur est définie sur la figure ci dessous.
– le pignon moteur 1 est monté en porte à faux sur l’axe du moteur électrique et ne fait l’objet d’aucune liaison avec le bâti du réducteur.
– le pignon intermédiaire 2 a pour but d’augmenter la distance entre les axes d’entrée et de sortie. Il fait l’objet d’une liaison pivot avec le bâti du réducteur.
– le pignon de sortie 3 est un pignon arbré tubulaire. Il fait l’objet: d’une liaison pivot L30 avec le bâti du réducteur, d’une liaison encastrement à plan prépondérant avec le premier joint de Cardan de la ligne d’accouplement (4). – le carter du réducteur moteur est en liaison encastrement avec le bâti du moteur électrique, lequel est fixé à la caisse de la voiture.
Je souhaiterai attirer votre attention sur la 2éme partie de l’image, où nous pouvons voir la disposition des pignons. http://barreau.matthieu.free.fr
Pour avoir le poids de l’AR.Drone nous avons utilisé une balance. Nous avons ensuite mesuré avec la coque pour l’intérieur et la coque pour l’extérieur. Nous avons trouvé un poids de 440g pour la coque intérieur et pour la coque extérieur nous avons trouvé 400g.
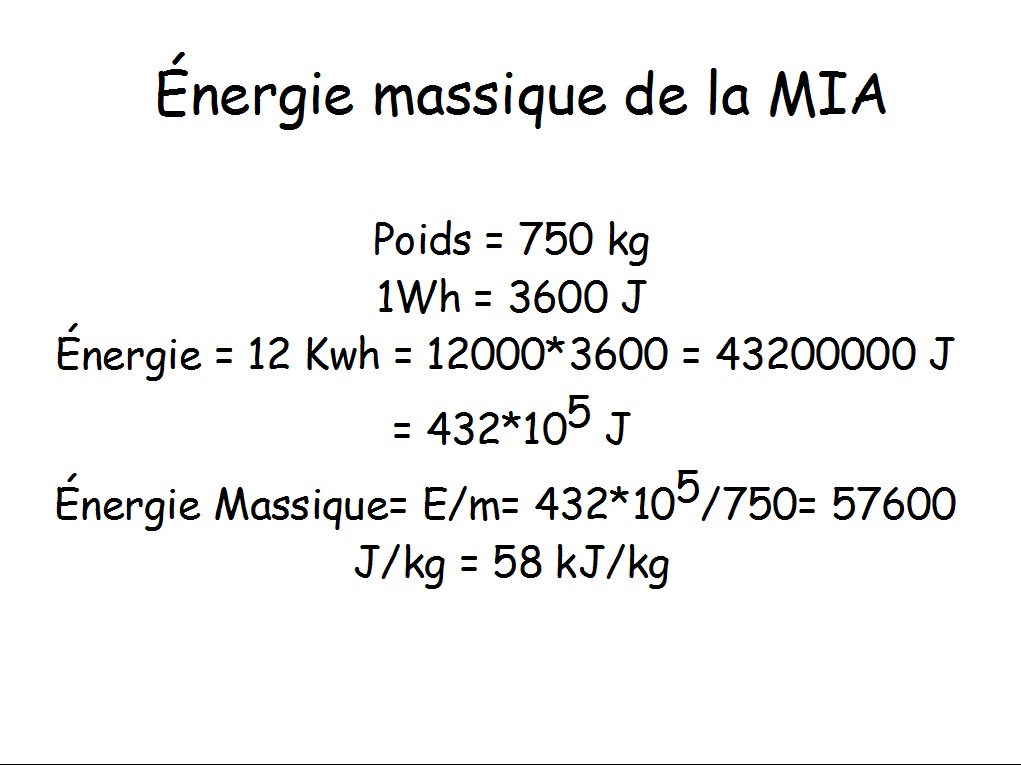
Energie massique de la Mia
Sachant que la Mia pèse 750 Kg et l’énergie de la Mia est de 12 Kwh 12000*3600 = 43200000 J = 432*10^5 J = 432*10^2 KJ L’énergie massique de la Mia est de 432*10^5/57600 J/Kg = 58 KJ/Kg
énergie massique de la Mia
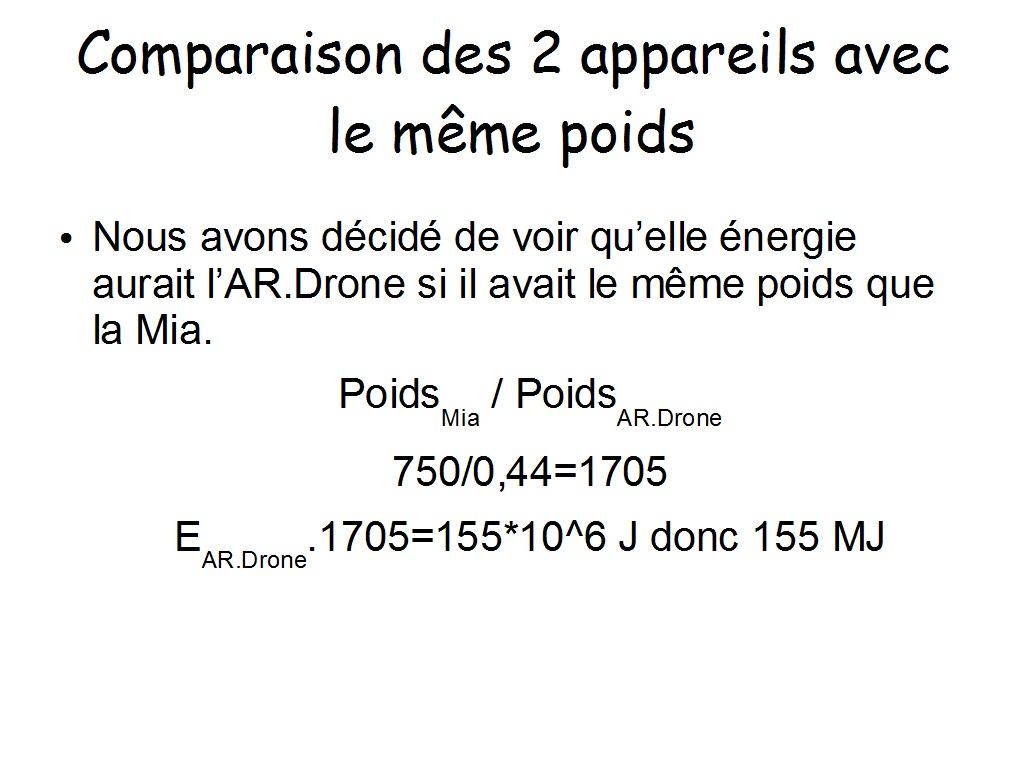
Comparaison entre deux appareils avec le même poids
Nous allons considérer le cas d’une utilisation en intérieur de l’AR Drone et allons négliger le cas d’une utilisation en extérieur.
Rapport des deux poids : 750/0.44 = 1705
Ensuite, nous multiplions le rapport par l’énergie de l’AR Drone intérieur
Le TGV, fleurons de la technologie française, et le train à grande vitesse célèbre pour ses record de vitesse, le dernier datant du 24 avril 2007 avec une vitesse de pointe de 574,8km/h. En vitesse de croisière, le TGV circule à 300km/h, mais sur les nouvelles “ligne grande vitesse”, il est prévue de faire circuler les trains à 320km/h.
Quel puissance faut t-il pour lancer un TGV à pleine vitesse , et quel sont les limites qui empêcherai de faire circuler les TGV à plus de 300 km/h ?
Nous étudierons dans cette article l’aspect motorisation du TGV ainsi que les limites de celui-ci. Nous verrons également les différent types de TGV.
Moteur du TGV
Après l’abandon de conception du TGV à gaz à la suite du choc pétrolier, la SNCF se tourne vers l’électricité. Ainsi naît le TGV Paris Sud Est (noté PSE) en 1981 doté de moteur à courant continu, puis dans les années 90, des moteurs à courant alternatif. Il y a un moteur par essieux, 4 par motrice, soit 8 pour une rame simple, et 16 pour une double rame. L’électricité et capté par le pantographe dans la caténaire. Un pantographe pèse 750 kg
Schéma fonctionnement d’un pantographe (http://gparam.free.fr)
Fonctionnement du moteur et type de courant qui alimente les moteurs
Le TGV PSE est une rame bi-courant capable de fonctionner aussi bien sur les lignes classiques utilisant un courant continu de 1500 Volts (noté C.C.). Sur le nouveau réseau construit spécialement pour lui utilisant un courant alternatif de 25000V de fréquence 50Hz ce qui lui permet d’être plus puissant. Le TGV PSE fournit alors une puissance de 6450KW sur son réseau spécial.
TGV PSE : rame bi-courant
1500 VDC sur lignes classiques, 25 kV AC 50 Hz sur LGV (plus puissant)
TGV sur 1500V DC : alimentation du moteur avec hacheur (modulation PWM).
Schéma d’un moteur TGV Triphasé. Les bobines à la périphérie sont alimentés en courant alternatif, légèrement décalé. Ce décalage permet de faire tourner la bobine centrale, car comme des aimants, les polarités des bobines se repousse. (http://tpe-tlm-sfa-bam.e-monsite.com)
Capacité du TGV a circulé sur d’autre réseau ferré, ….
Sur le nouveau réseau construit spécialement pour lui utilisant un courant alternatif de 25000V de fréquence 50Hz ce qui lui permet d’être plus puissant.
Les moteurs synchrones fonctionnent en courant continu, on les utilise car ils sont capables de maintenir un régime constant précis de part leur fréquence de rotation. Dans le cas du TGV, il est alimenté sur les lignes grande vitesse en courant 25000V; 50Hz.
Besoins énergitiques du TGV
L’électricité dans la caténaire, capté par le pantographe arrive dans la motrice vers des transformateur qui font passé la tension de 25 000V à 1800V pour la rendre utilisable par les moteurs. Cette énergie entraine également un alternateur afin de produire de l’électricité pour subvenir au besoins du Train, comme le 230V, alimenter les lumières, etc…
Etude des différents moteurs des différents TGV existant ( Thalys, Eurostar, Duplex, POS, PSE, Atlantique….
Les TGV, Thalys, Eurostar, POS, peuvent capter plusieurs types de courants électrique, étant donné qu’ils circulent dans toutes l’Europe et que le courant est différant d’un pays à un autre.
TGV
Type moteur
Type courant
POS
8 moteur synchrones
Alternatif
Eurostar
12 moteurs triphasés asynchrones
Alternatif
Thalys
8 moteurs triphasés asynchrones
Alternatif
Duplex
8 moteur synchrones
Alternatif
Cependant, une motrice d’Eurostar, de Thalys ou de POS, couteux deux fois plus cher qu’une motrice standard de TGV Atlantique, Duplex ou PSE.
Limite du TGV
Les TGV ne peuvent dépasser actuellement 300km/h en raison de plusieurs phénomène physique:
Le mur de la caténaire: Il s’agit d’une onde mécanique qui se propage le long de la caténaire, bien avant le train. Si le TGV va plus vite que l’onde, il la rattrape, et se retrouverai dans le creux de l’onde, et ses système de sécurité ferai dijoncter les moteurs, et le train s’immobiliserait.
Puissance moteur: Pour dépasser les 300km/h, il faudrait remplacer les moteurs actuel par des moteurs plus puissant et probablement qui consomme plus d’énergie.
L’aérodynamisme: Pour plus de vitesse sans frottement, il faudrait revoir les formes aérodynamique du TGV, repartir de zéro sur la conception de la forme.
L’AGV à une motorisation répartie c’est à dire que tout les essieux peuvent être moteurs contrairement aux TGV où la motorisation est centrée sur les 2 rames motrices, la motrice ce trouvant à l’avant et à l’arrière du train. Dans un cas réel tout les essieux ne doivent pas être moteurs cela dépend de la puissance voulut. Cette absence est un choix de la SNCF et à montrer ces preuves lord d’accident évitant que les rames ce rentrent les une dans les autres (en porte feuille) sauvant ainsi de nombreuses personnes.
Les moteurs ce trouvant actuellement sur les TGV n’étant pas adapter car étant trop volumineux pour loger dans les bogies il faudrait les remplacer par des moteurs synchrones à aimants permanents beaucoup plus petit, ne transmutant moins de vibrations aux passagers et apportant plus de sécurité et de confort . Cette disposition apporte aussi de l’espace utile donc permet de faire voyager plus de personnes jusqu’à 460 places assises pour une rame de 200 m de long. De plus la masse réduirais de 430 à 395 tonnes par rapport aux TGV actuel, la consommation d’énergie de 15 % et les coûts de maintenance de 30%. Le rapport puissance/poids de l’AGV est aussi très bon de l’ordre de 22kW/h. Enfin son impact environnemental est très faible car il est fait de matériaux recyclables à 98%
La première rame prototype complète, dénommée PEGASE est sortie des usines Alstom d’Aytré en février 2008 pour entamer une campagne d’essais de six mois en République tchèque.
Les principales dates de l’Agv celon alstom créateur de celui-ci
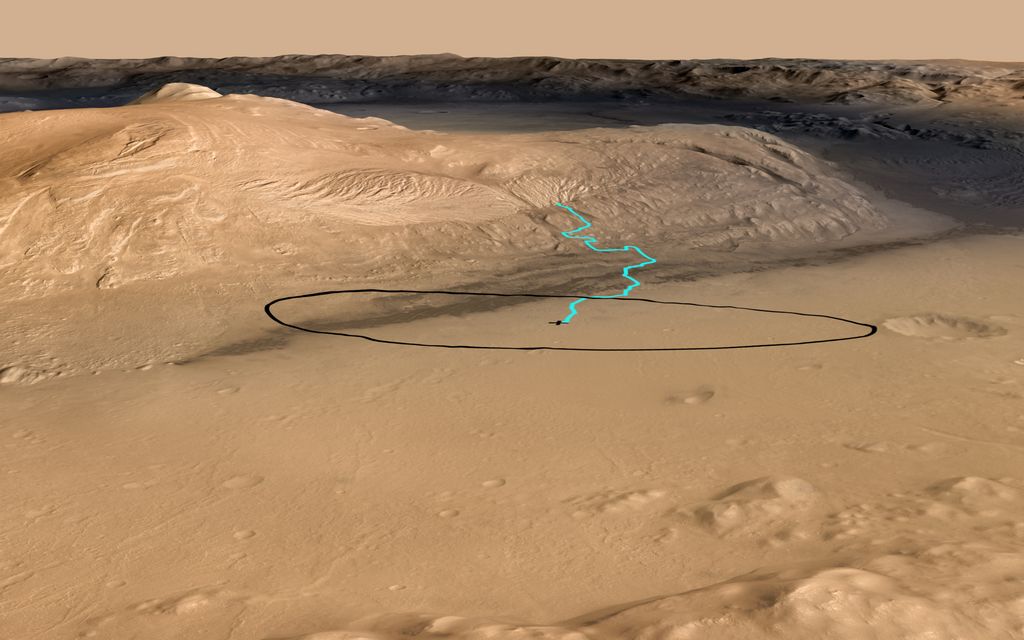
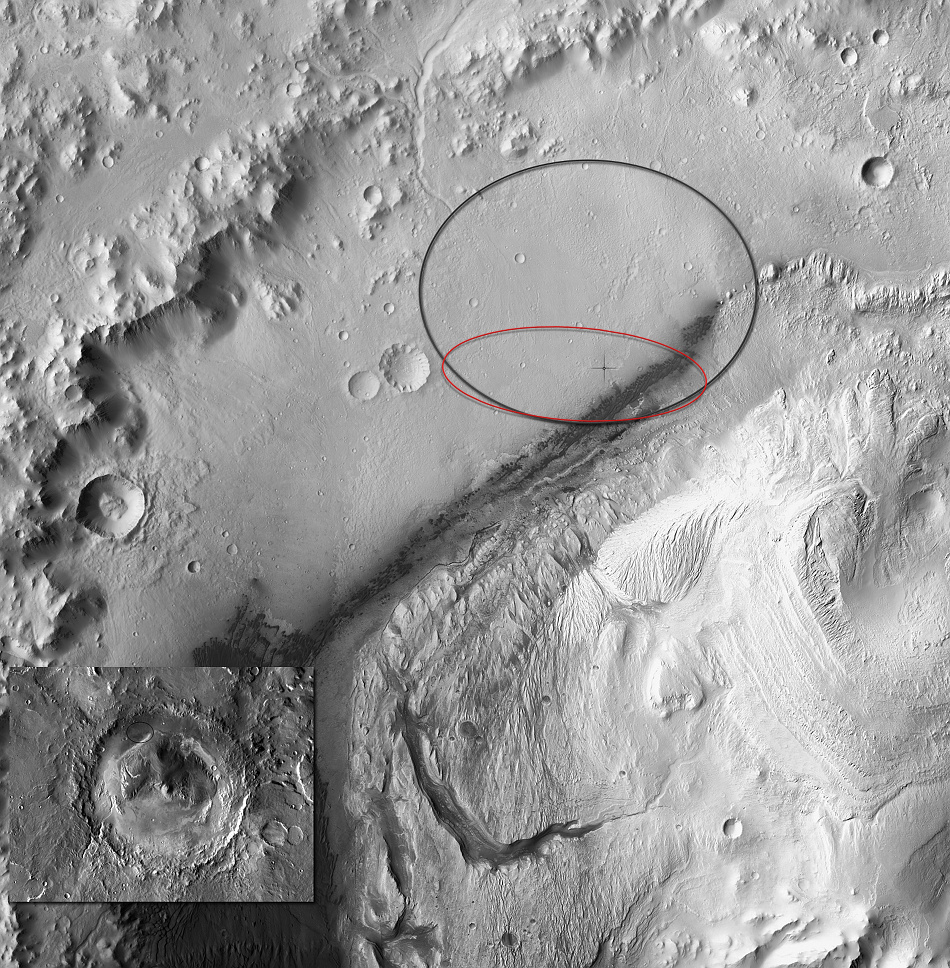
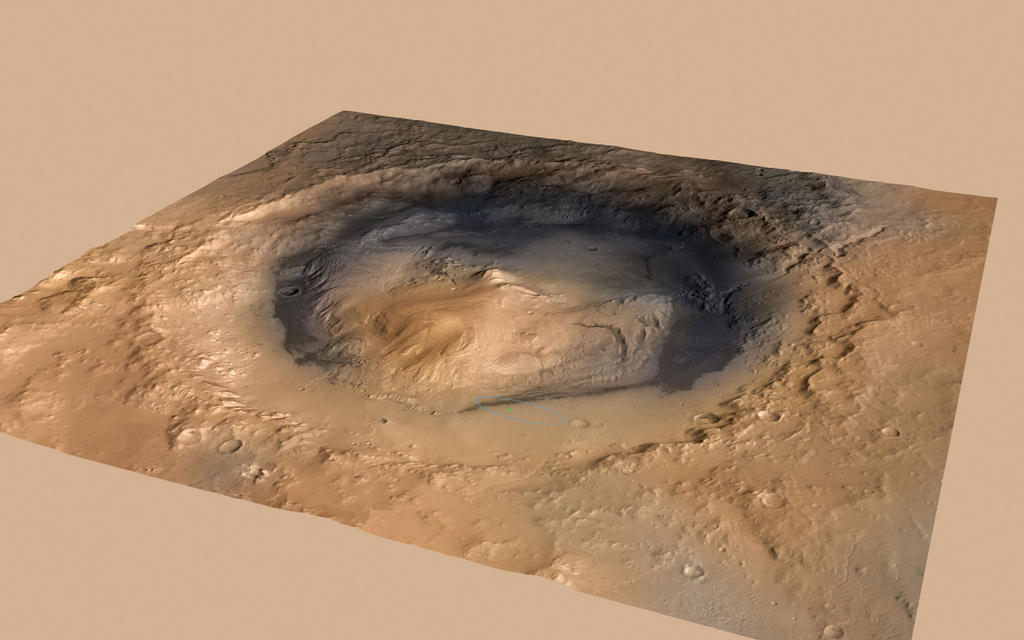
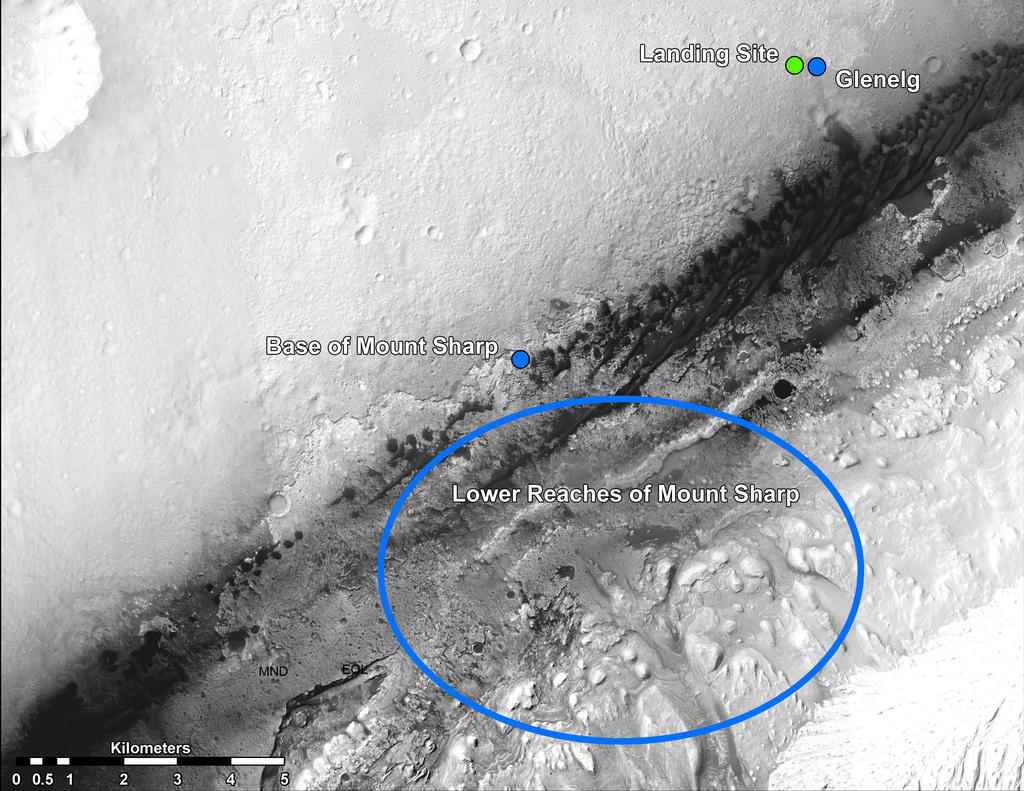
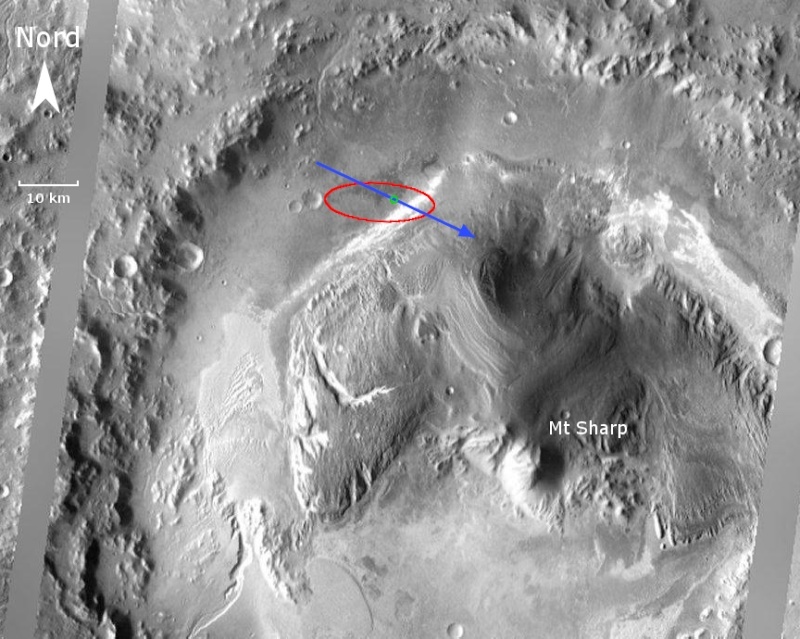
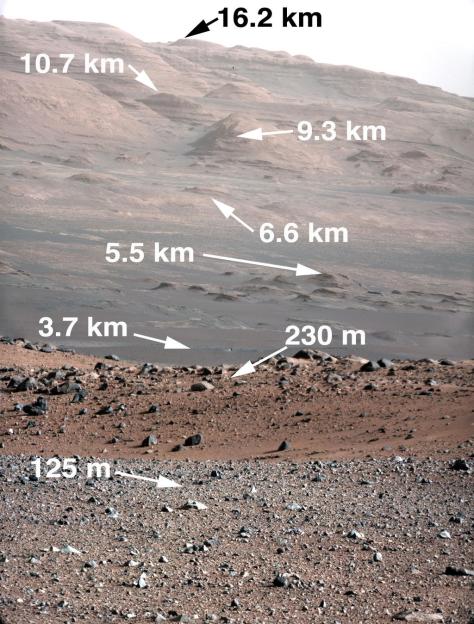
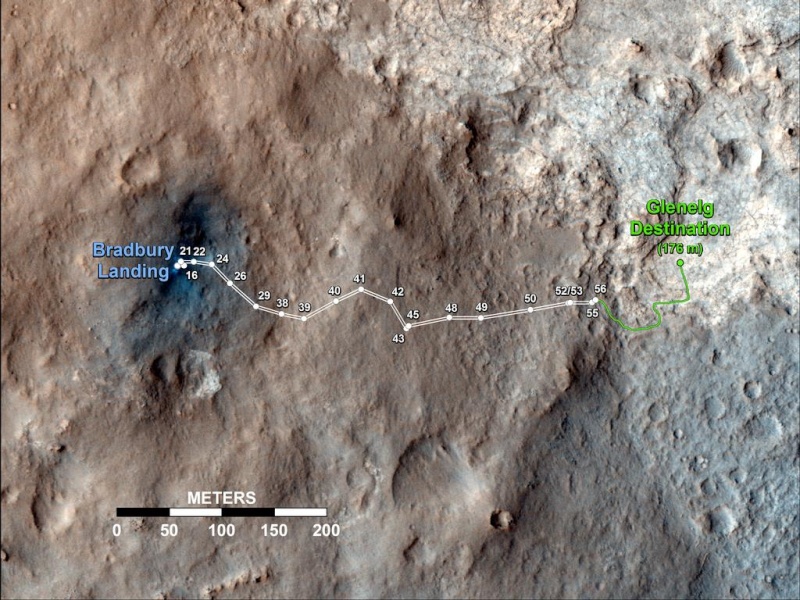
En noir, zone d’aterrissage visée, au pied d’une montagne de plus de 5000m. En bleu, trajet prévu pour aller chercher des argiles dans un canyon à flan de montagne. Source : mars.jpl.nasa.gov
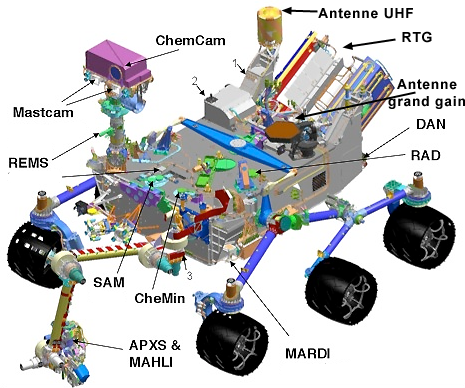
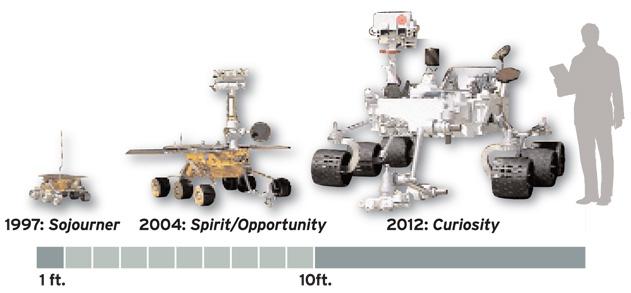
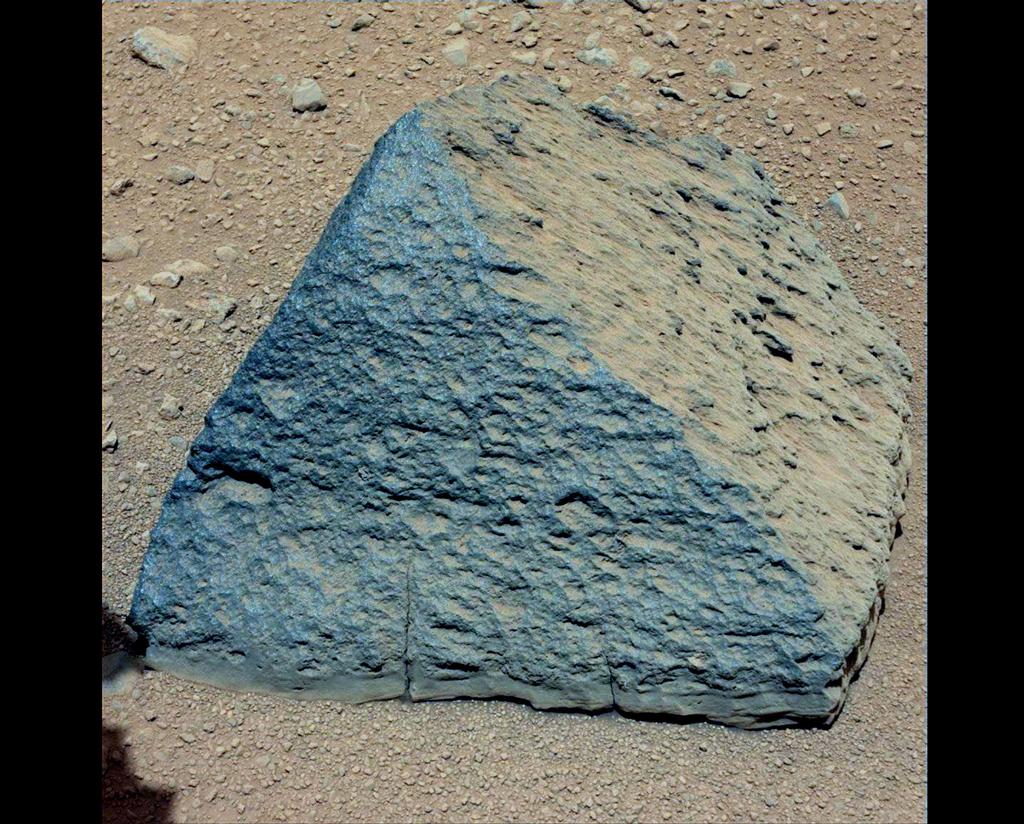
Le robot Curiosity
Le robot Curiosity. Source : Wikipedia
Atterrissage réussi le 5 aout 2012
L’élipse bleue au bas de la montagne représente la cible. Le point vert est le point d’aterrissage du robot. Objectif : monter sur la montagne (Mont Sharp à 5500 m d’altitude !)
Planning de début de mission
Le rover est à 8 km de la zone cible à étudier au pied du Mont Sharp
Déploiement de l’antenne grand gain (vers la Terre)
Déploiement du mat
Test des instruments
Transmission de données
Acquisition d’images panoramiques
Mise à jour logicielle
Test des actuateurs pour faire pivoter les roues
Premiers déplacements
Qualification des instruments du rover (premier mois)
Premières analyses et prélèvements
Environ 50 m par jour : il faudra près de 6 mois pour atteindre le pied de la montagne.
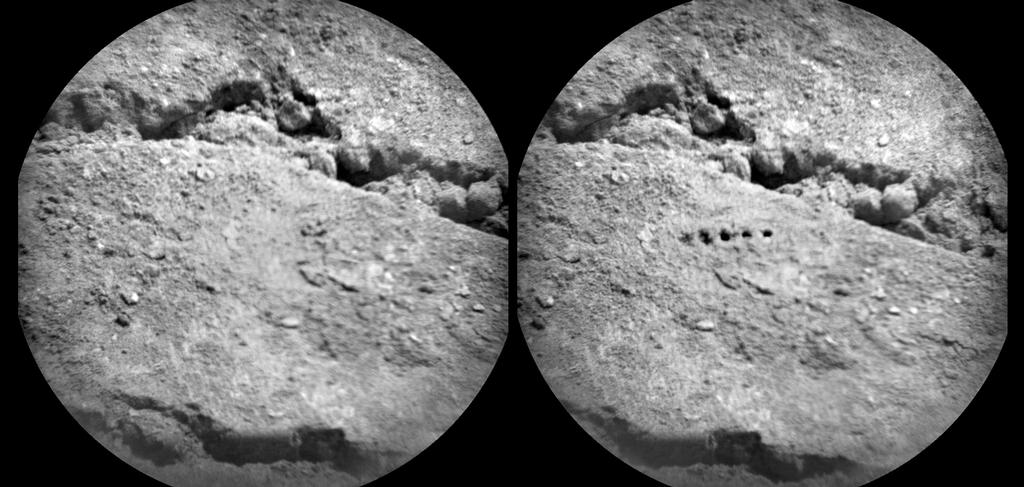
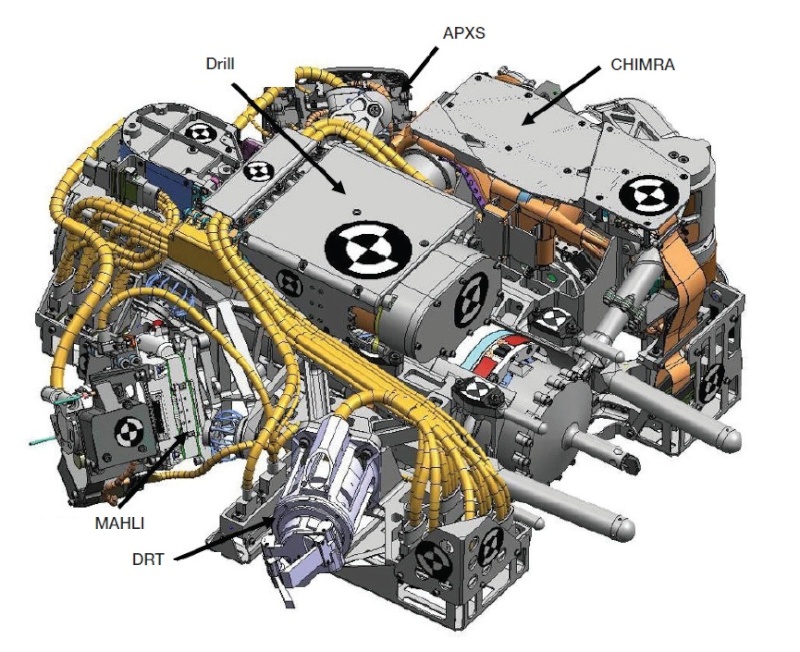
Les mires de positionnement. Cela permet de déterminer où se trouve très précisément la tourelle après déploiement du bras, et mesurer les écarts par rapport aux tests faits sur Terre, ou en simulation.
Lorsque les instruments seront utilisés sur le sol, il faudra savoir pointer la foreuse, par exemple, au millimètre près – voir mieux.
Avant cela, le mouvement du mat – et de sa tête – et donc le pointage des différentes caméras, a été analysé de la même manière par rapport à des mires fixées sur le corps du rover*.
http://www.youtube.com/watch?v=Fix1pJknjbo
Ordinateur de bord
mise à jour des capacités logicielles du rover : suppression des logiciels de l’EDL, remplacés par une version R10 qui contient un version améliorée pour la conduite autonome, l’utilisation des instruments sur le bras, etc… Et il faut mettre à jour le logiciel pour les deux environnements informatiques redondées.
Précisons que le rover est équipé de deux ordinateurs certes, mais, qu’un seul n’est actif à la fois.
Tous deux sont conçus avec le même processeur “BAE RAD750” d’une puissance maxi de 200 mégahertz. Chaque ordinateur est équipé de 2 gigaoctets de mémoire flash, 256 Mo de mémoire vive et de 256 kilo-octets de mémoire effaçable programmable en lecture seule. Aussi, le nouveau logiciel en question a été envoyé alors que le vaisseau spatial était encore sur la route le conduisant à Mars. Depuis vendredi soir les ingénieurs ont commencé à installer la mise à jour R10, d’abord sur un ordinateur, puis sur l’autre. Les quatre jours de mise à jours s’expliquent par le fait qu’ils auront a effectuer des tests sur chaque systeme au fur et à mesure que la MAJ avance, afin de s’assurer que tout va bien.
Oui des données peuvent être perdues ou corrompues pendant le transfert, mais il y a des systèmes de vérification de données qui permettent de savoir si une donnée est valide ou manquante. Dans ce cas ces parties sont réémises.
Ensuite en cas de bug ou autre, c’est tout l’intérêt d’avoir deux UC en parallèles. Ils font la MAJ (après avoir téléchargé et vérifié l’ensemble du prog) sur l’un pendant que l’autre tourne sur l’ancienne version. Ensuite il font tous les tests de l’UC mis à jour et si ça plante ils peuvent reprendre la main avec l’autre et recommencer. Si par contre tout est bon, ils passent à la MAJ du deuxième.
LA MAJ à distance est une méthode qu’ils maitrisent depuis pas mal d’années, et sur certaines missions ils ont même été capable de reprendre la main sur des sondes plantées (bug ou défaillance technique) juste avec un simple “ping”.
Les moyens de télécommunication
L’antenne grand gain fonctionne, l’antenne omnidirectionnelle lui bloque la vue sur une très faible partie de l’arc que fait la Terre dans le ciel martien. C’est juste pas de bol, très peu handicapant, et ça sera réglé dès la première manoeuvre au sol du rover.
une antenne à haut gain (= gros débit) qui est directionnelle (doit être pointée),
– une antenne à faible gain (= faible débit) qui est omnidirectionnelle (pas de pointage).
La seconde sert de “secours” car elle ne nécessite pas d’être déployée ni de bien connaître l’orientation de la sonde.
http://www.youtube.com/watch?v=yKDBojlncss&hd=1
L’énergie de Curiosity
Le principe de base est très simple, le combustible (Plutonium dans ce cas), dégage de la chaleur, le plutonium chauffe et est en contact avec une multitude de thermocouples monté en parallèle/série (utilisation de l’effet thermoélectrique- transformation de la chaleur en courant électrique). Le principe est tellement simple que la fiabilité est maximum, c’est tout sauf une usine à gaz !!!! Faut juste soigner le conditionnement, pas question qu’un atome de 238PuO2 sorte de sa boite…
C’est sûr que ce n’est pas extra puisque la différence de température entre la source chaude et la source froide n’est pas très grande vu que la température d’un RTG plafonne à 1000 °C (soit moins de 1300 K) Toutefois heureusement que les températures sur Mars sont plus basses que sur la Terre , ce qui permet pour la source froide de se retrouver vers -100 °c pendant les nuits (moins de 200 K)
C’est plutôt le rendement des thermocouples qui grève les perfos, c’est la contrepartie à la fiabilité.
Le générateur GTR est prévu pour une durée de 2 ans, mais l’énergie fourni ne permet au rover de ne fonctionner que 6h par jour.
au dela des 2 ans, la puissance va décroitre au point que le rover ne pourra plus trop se déplacer mais plutot envoyer des données basiques (T°, photo, etc) et ce durant 14 ans.
Le MMRTG fournit 120 W en debut de mission, et 100 W au bout de 14 ans.
Le générateur isotopique recharge les batteries la nuit, faire déplacer le Rover de nuit, en même temps que la recharge s’avérerait trop gourmant en énergie…
Il est précisé qu’avec une performance de 42 Ah (x2), ces batteries viendront compléter le générateur nucléaire ( pour simplifier, mais c’est un MMRTG) pour assurer les besoins énergétiques de tous les systèmes de la sonde lors des pics d’activités. Il est attendue que plusieurs cycles de recharges/décharges se produiront chaque sol
En clair, c’est pour rappeler que MSL consomme plus que ce que peut fournir son RTG. Il faudra donc, comme pour Oppy et Spirit, faire le plein d’énergie régulièrement pour assurer les opérations journalières : chauffage électrique des divers actuateurs, fonctionnement des moteurs (de roues par exemple), les instruments scientifiques, le bras, le laser… A la différence des MER toutefois, Curiosity devrait moins craindre l’hiver et les tempêtes de poussière, et son manque d’ensoleillement.
La station météo embarquée sur Curiosity
Tout restera calme d’un point de vue météo sur le site d’atterrissage de Curiosity au cours des prochaines heures. Un ciel clair devrait dominer Gale, mais des tempêtes de poussière seraient désormais évoquées pour un avenir pas si lointain que cela. «Pour la journée de demain nous nous attendons à une journée calme sur Mars avec juste quelques nuages de glace à l’horizon. Les températures extérieures devraient rester douces, c.a.d. – 28°c Celsius, mais du jour au lendemain nous pourrions recenser des températures vraiment plus froides c.a.d. jusqu’à -128°c » annonce Manuel de la Torres. J’ajoute que les vents devraient être calmes et que le ciel devrait être rose.
Notons également que la saison d’hiver touche prochainement à sa fin sur la planète rouge. Au printemps et durant l’été, des tourbillons de poussière/ colonnes tourbillonnantes de poussière agissent comme des tornades. Curiosity est doté d’une station météo sophistiqué qui permettra aux météorologues et autres scientifiques d’étudier ce type de phénomènes.
Deux capteurs seraient reliés à une station météo installés sur le mât du Rover (Là où se trouve sa chemCam), ce qui permettra de mesurer la vitesse du vent, la direction du vent, la température de l’air ainsi que son humidité relative. En outre la température du sol sera également mesurée par ce système. La station météo du robot comporte aussi un dispositif qui mesure la pression de l’air et un capteur qui enregistre six bandes de longueurs d’onde différentes. Les données météo martiennes joueront un rôle clé pour déterminer si la planète est, ou a jamais été, habitable, mais encore si les conditions météo seraient un éventuel conducteur à la formation d’une vie primitive.
Fabriqué en Espagne, la station météorologique du rover pourra également fournir aux scientifiques des données essentielles pour le bon déroulement de sa mission. Le rover Curiosity a atterri lundi matin, sa station météo ae été mis sous tension presque immédiatement. Au cours des deux prochaines années, la station météo enregistrera des données sur moins cinq minutes toutes les heures. (belle perfo). De T.Hadvorson traduit et adapté par Sidjay pour FCS.
La station météo du Rover (Rover Environmental Monitoring Station (REMS)) est d’origine espagnole comme je le disais plus plus haut. (elle serait déjà en route depuis le 06 Aout à priori)
Elle a été conçu pour enregistrer six paramètres atmosphériques différents:
– Vitesse du vent / direction.
– Pression.
– Humidité relative.
– Température de l’air.
– Température du sol.
– Rayonnement ultraviolet.
Elle se compose de:
– Deux capteurs fixées à environs 1,5 m au-dessus du niveau du sol via le mât mobile principal du Rover.
– D’un capteur de rayonnement ultraviolet (UVS) situé sur le pont supérieur du rover.
– D’unité de contrôle (USI) située à l’intérieur.
Les deux rampes de capteurs sont séparés par un azimut de 120 degrés pour aider à assurer qu’au moins l’un d’eux puisse enregistrer les données de vent. La figure ci-dessus illustre cela par ailleurs. Notez également qu’il ya une différence de hauteur de 50 mm entre les deux rampes de capteurs (ou Boom), afin de minimiser toute perturbation relative entre deux vents.
La Rampe 2 (à droite sur le dessin) a été installé dans l’axe d’entraînement du robot.
Elle est muni de capteurs dédié aux études éoliennes, mais intègre également le capteur d’humidité.
La rampe 1 (à gauche sur le dessin) est très légèrement installée en direction de l’arrière droit du rover. Elle intègre une autre série de capteurs-vent et mais aussi le capteur de température du sol. Les deux rampes intègrent en revanche un capteur de température de l’air chacune.
Il y a deux sondes placées perpendiculairement sur le mat, l’un d’entre eux – et l’un des capteurs de mesure de la vitesse des vents – semble avoir été endommagé par la projection des gravillons lors de l’atterrissage : les connections avec ce capteur semblent avoir été rompues.
– Une page sera mise en ligne avec les données météo
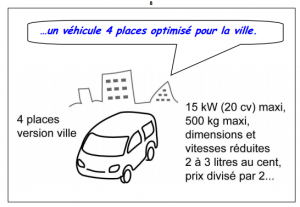
Tout dabord pour limiter la consommation des voitures actuel il faut en crée 2 sortes:
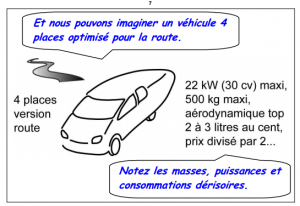
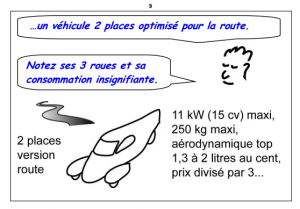
-si le véhicule est plutôt destiné à la route, il faut le concevoir léger et bien profilé donc dit citadine
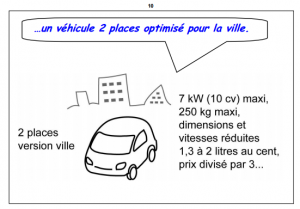
-si le véhicule est plutôt destiné à la ville, il faut le concevoir léger et ne pas se préoccuper d’aérodynamique, ce qui permet par ailleurs de réduire les dimensions donc dit provincial.
I-Expliquer pourquoi une partie de la France est en alerte rouge à la pollution ces jours-ci?
Une partie de la France est en alerte rouge à la pollution ces derniers jours car le niveaux de particules sont trop élevés.
1) Comment sont elles?
Classifié par leurs tailles les particules où la poussière sont rarement constitué de même substances: les particules dite «grossières» ou «PM10» font moins de 10µm et pénètrent dans les poumons, et les particules dite «fines» ou «PM2,5» font moins de 2,5µm et vont jusqu’aux plus profondes alvéoles.
2) D’où viennent elles?
Les particules présentent dans l’aire viennent à 34% d’origine domestique principalement de la combustion du bois qui émet 40% des particules PM2,5, de l’exploitation industrielle et des transformation d’énergies à 31%, d’origines agricoles à 21% et à 14% issue des transport qui émet aussi du NO2 c’est à dire du dioxyde de d’azote qui est un précurseur d’autres polluants comme par exemple l’ozone.
3) Quelles sont leurs impacts sur la santé?
Les particules présentes dans l’air ont bien un impact non négligeable sur les personnes: 3,5 millions d’asmathiques, 50 000 personnes atteintes par une insuffisance respiratoire surtout les enfants plus sensibles, 30% de la population présente une allergie respiratoire par une sensibilité bronchique plus importante et des hyper réactivités bronchique mais le plus effrayant c’est les 42 000 décès par an du à les particules PM 2,5.
L’alerte due à la pollution et aux particules est donc très importante pour protéger les populations et les prévenir des risques pour les personnes sensibles comme les personnes âgées et les enfants.
4) Les Normes
Norme Euro 5
Les normes Euros ( Normes Européennes d’émission) sont des règlements de l’Union européenne qui fixent les limites de rejets polluants pour les véhicules roulants.
Émissions provenant des voitures diesel:
monoxyde de carbone : 500 mg/km;
particules : 5 mg/km (une réduction de 80 % par rapport à la norme Euro 4);
oxydes d’azote (NOx) : 180 mg/km (une réduction de plus de 20 % par rapport à la norme Euro 4);
émissions combinées d’hydrocarbures et d’oxydes d’azote : 230 mg/km.
Émissions provenant des voitures à essence ou fonctionnant au gaz naturel ou au GPL :
monoxyde de carbone : 1000 mg/km;
hydrocarbures non méthaniques : 68 mg/km;
hydrocarbures totaux : 100 mg/km;
oxydes d’azote (NOx) : 60 mg/km (avec une réduction de 25 % par rapport à la norme Euro 4 );
particules : 5 mg/km (cette norme n’existe pas dans la norme Euro 4)
La norme Euro 5 est applicable depuis le 1er septembre 2009 en ce qui concerne la réception des véhicules et sera applicable à partir du 1er janvier 2011 en ce qui concerne l’immatriculation et la vente des nouveaux types de véhicules.
La MIA est dédié à l’allégement, l’aérodynamique et l’architecture des véhicules routiers, des deux roues jusqu’aux poids lourds, quelle que soit la technologie de propulsion. L’objectif d’allègement du véhicule est d’au moins 20 % par rapport au véhicule de référence. La MIA vise à agir sur l’origine de la consommation d’énergie de nos véhicules quels qu’ils soient terrestres ou aériens. Réduire la masse et améliorer l’aérodynamique permettent de réduire le besoin en énergie de nos véhicules. Réduire la masse de 20 % d’un véhicule permet une réduction d’environ 14 % de consommation.
Un des premiers objectifs ce de réduire nos émissions de CO2, cet objectif est atteignable au prix d’une optimisation de nos moyens de transports associée à une relative diminution de nos déplacements. Comme par exemple l’avion, le TGV et la voiture à essence.
Ma même une voiture électrique émet du CO2 indirectement parce que pour produire de l’électricité nous avons besoin des centrales qu’eux émettent du CO2. La solution hybride permet de faire fonctionner le moteur thermique dans de meilleures conditions. Ceci autorise une réduction des consommations d’énergie d’environ 25% et d’essence.
Consommation d’essence
Lorsqu’une voiture se déplace à vitesse constante, elle est soumise à un certain nombre de forces qui s’opposent à son déplacement : la résistance de l’air et la résistance du roulement.
La résistance total en fonction de la vitesse
La courbe suivante permet de comparer les deux composantes de la résistance à l’avancement. On voit alors que la résistance de l’air peut être négligée si la vitesse est inférieure à 20 km/h. Mais aux vitesse sur route et autoroute en Europe, elle représente 33% du total à 90 km/h et 20% du total à 130 km/h.






































{kind=link}