La combustion du charbon et du pétrole est l’origine principale des émissions de CO2. Si les émissions de CO2 sont la principale cause du réchauffement climatique, alors il faut les réduire. La déforestation occupe 15% des émissions de gaz à effet de serre.
Récemment, la COP21 (21ème Conférence des Parties) s’est déroulée à Paris. L’objectif de cette conférence était de parvenir à un accord pour que d’ici la fin du siècle on puisse limiter le réchauffement climatique à +1,5°C
Les solutions :
Il faut changer petit à petit nos modes de consommation d’énergie pour passer des énergies fossiles aux énergies renouvelables.
Réduire la déforestation.
Chaque habitant lutte à sa manière et réduit ses émissions de CO2, par exemple, isoler sa maison ; éteindre la lumière lorsque l’on sort d’une pièce ; se déplacer à pied ou à vélo plutôt qu’utiliser la voiture car elle consomme du carburant et cela a une incidence sur l’environnement…
Il faut réduire la consommation d’énergie par exemple, utiliser des ampoules LED plutôt que des ampoules à incandescence.
Sources :
Eutrio.be – Vedura – Climatechallenge.be – Gouvernement
Du 24 au 28 août, une douzaine d’élèves (de la 6e à la 3e) ont travaillé à la conception et à la fabrication de petits robots avec l’aide d’un professeur de Technologie (M Pers), à raison de 2h30 par jour environ. Ils se sont répartis en 3 équipes. Chacune a défini ce que devrait faire son robot. M Pers a ensuite montré le matériel disponible et chaque équipe a choisi des composants : une base roulante motorisée, une carte électronique programmable, des capteurs, … Le début de l’assemblage a été assez rapide. Un premier programme de test a été fourni pour permettre les premiers tests dès le deuxième jour. La personnalisation du matériel et du programme s’est poursuivie les jours suivants avec notamment des fichiers audio différents pour chaque équipe (à partir de ressources sur Internet ou à partir d’enregistrements faits par les élèves avec un micro et le le logiciel Audacity). Les élèves ont ensuite dessiné des pièces en plastiques pour habiller leurs robots. La découpe et l’assemblage de ces pièces n’ont pas encore été terminés. Il a manqué du temps également pour terminer la personnalisation des programmes par rapport aux souhaits des élèves. Cela a donné envie aux élèves présents d’apprendre la programmation. Cela fera partie des objectifs en classe de Technologie, en 4e notamment. Quasiment tous les élèves présents, de la 6e à la 3e, ont exprimé le souhait de pouvoir apprendre la programmation. N’hésitez pas à laisser un commentaire si cela vous intéresse.
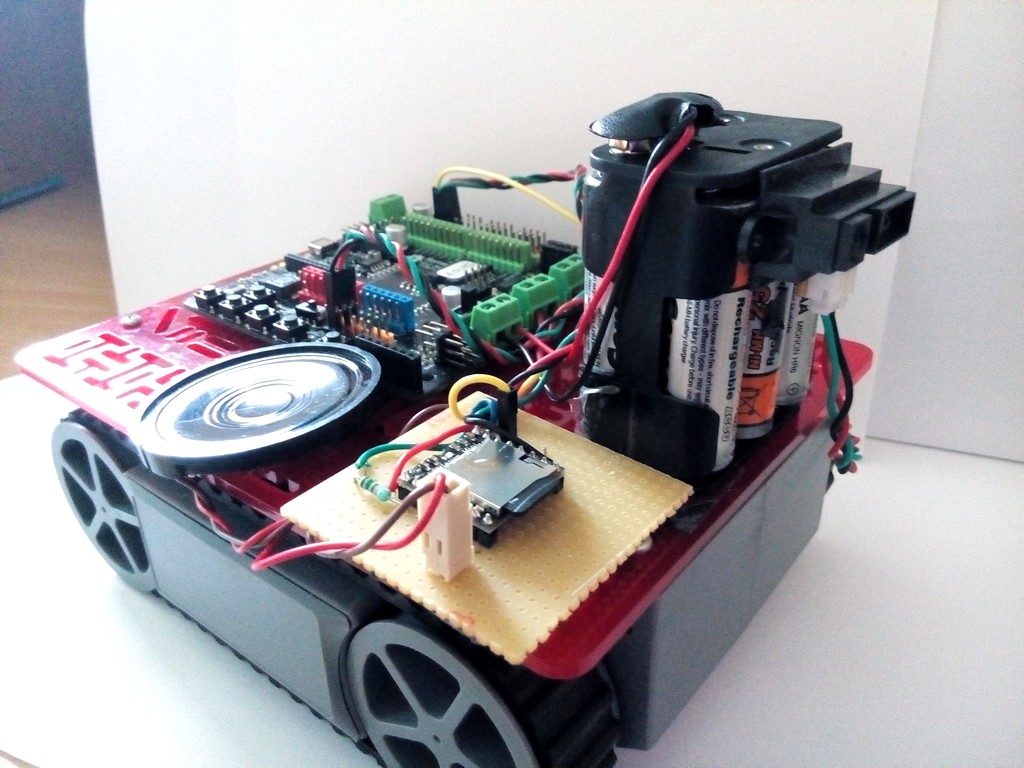
Deux des robots fabriqués utilisaient une base roulante motorisée à chenilles (Source : Collège Jean Macé)
Composants visibles ici : carte électronique Programmable, batterie, module audio et haut-parleur (Source : Collège Jean Macé)
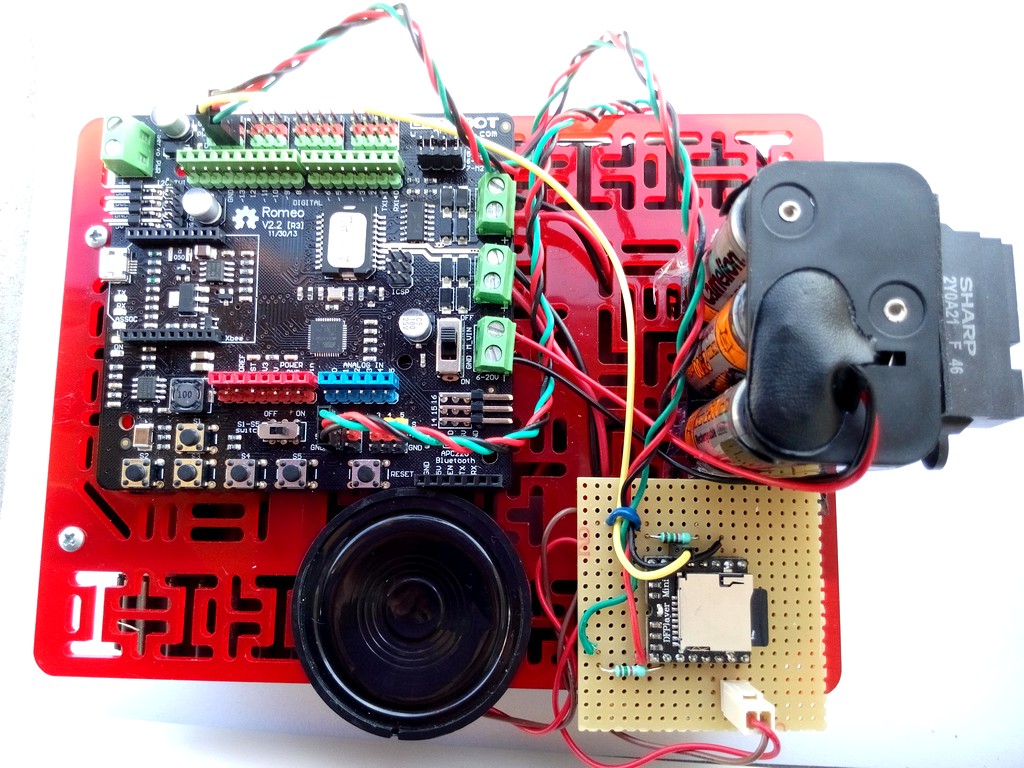
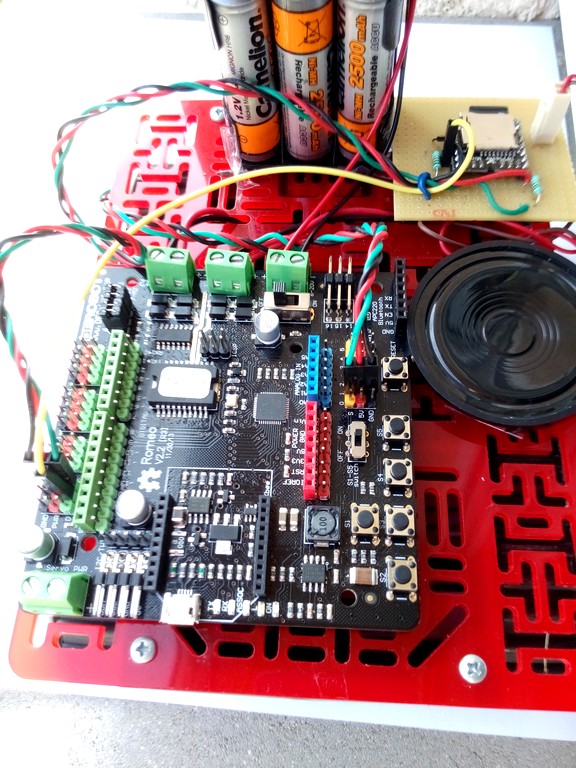
Carte électronique programmable Arduino (Source : Collège Jean Macé)
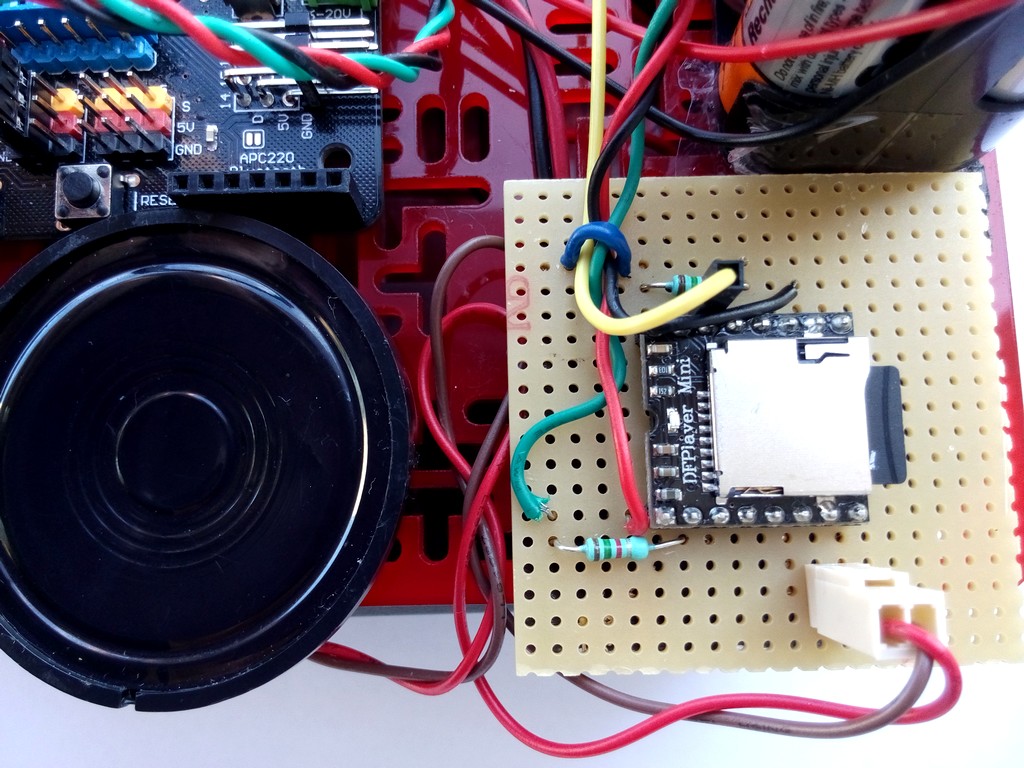
Module audio DFPlayer qui permet de commander avec la carte Arduino la lecture de fichiers audio mp3 stockés dans une carte micro SD. Un petit haut-parleur 50 Ohm est branché directement dessus (3 W maxi)
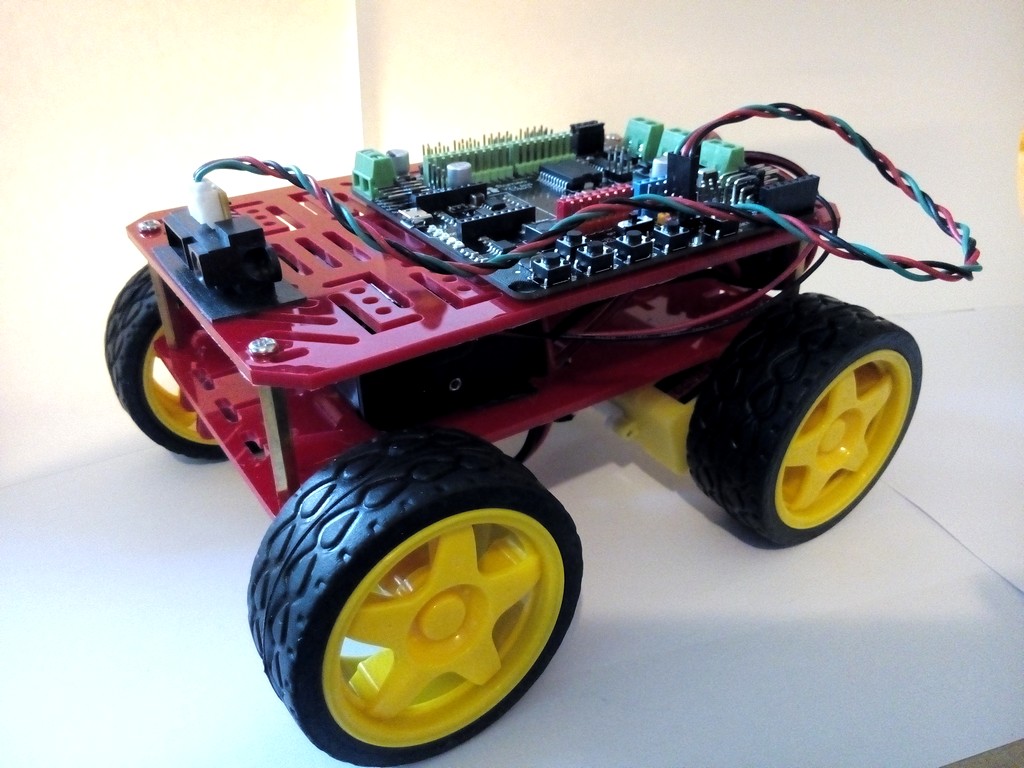
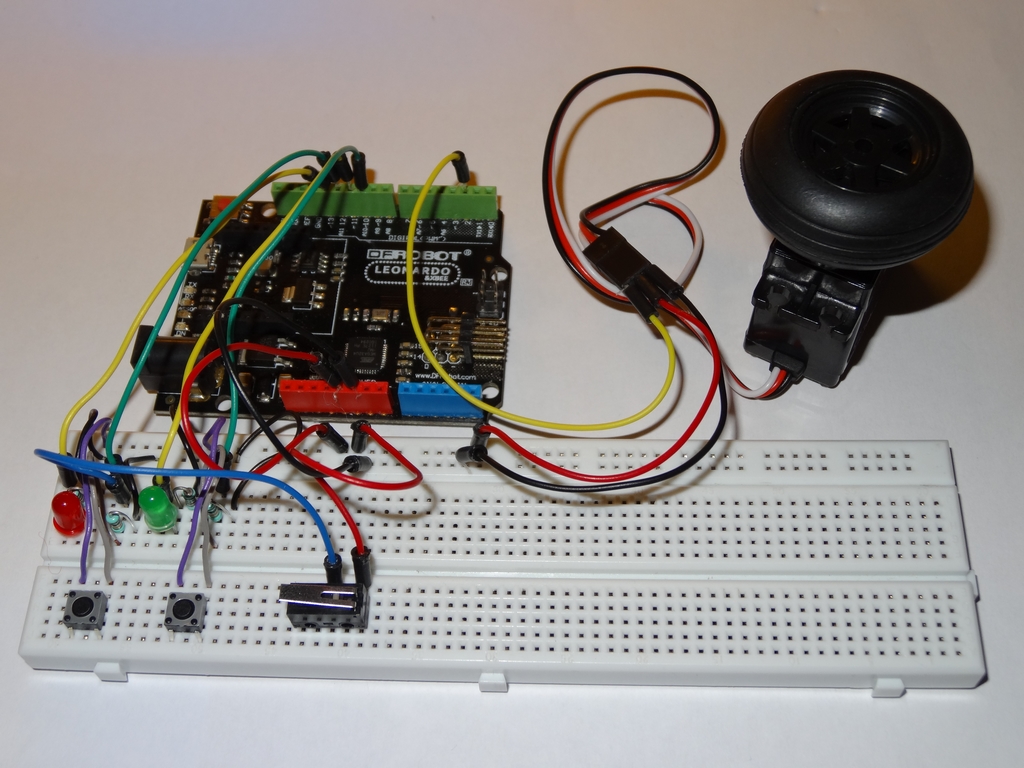
Un robot entièrement assemblé par les élèves à partir d’une base roulante motorisée DG008 en kit (4 roues motrices). (Source Collège Jean Macé)
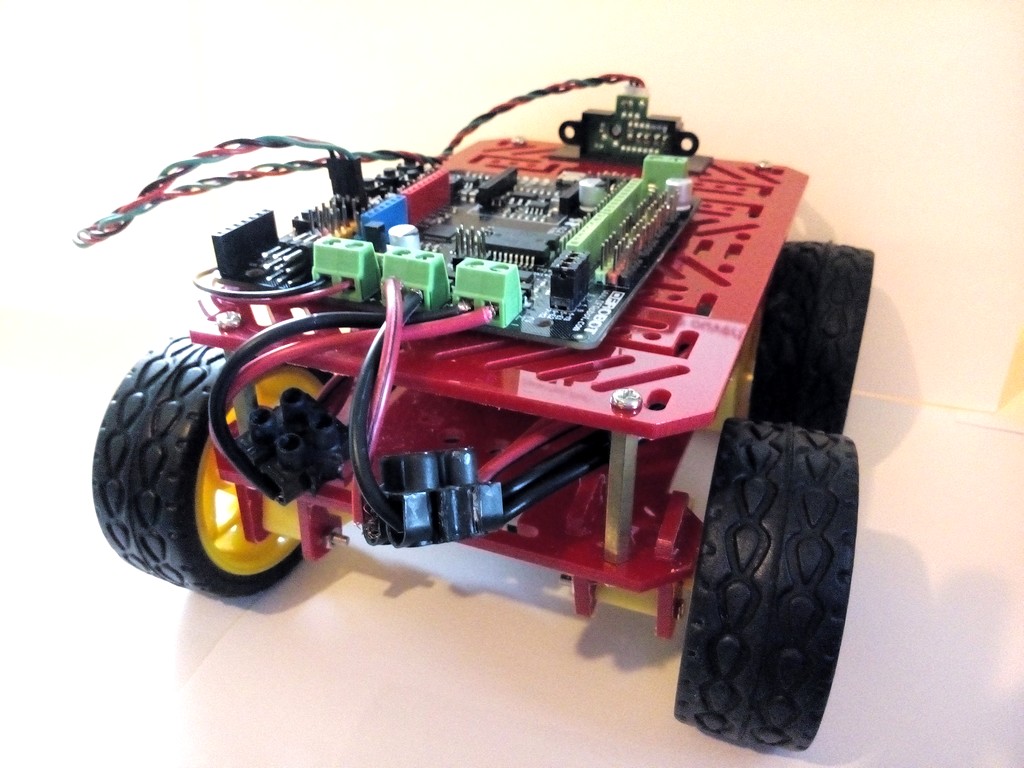
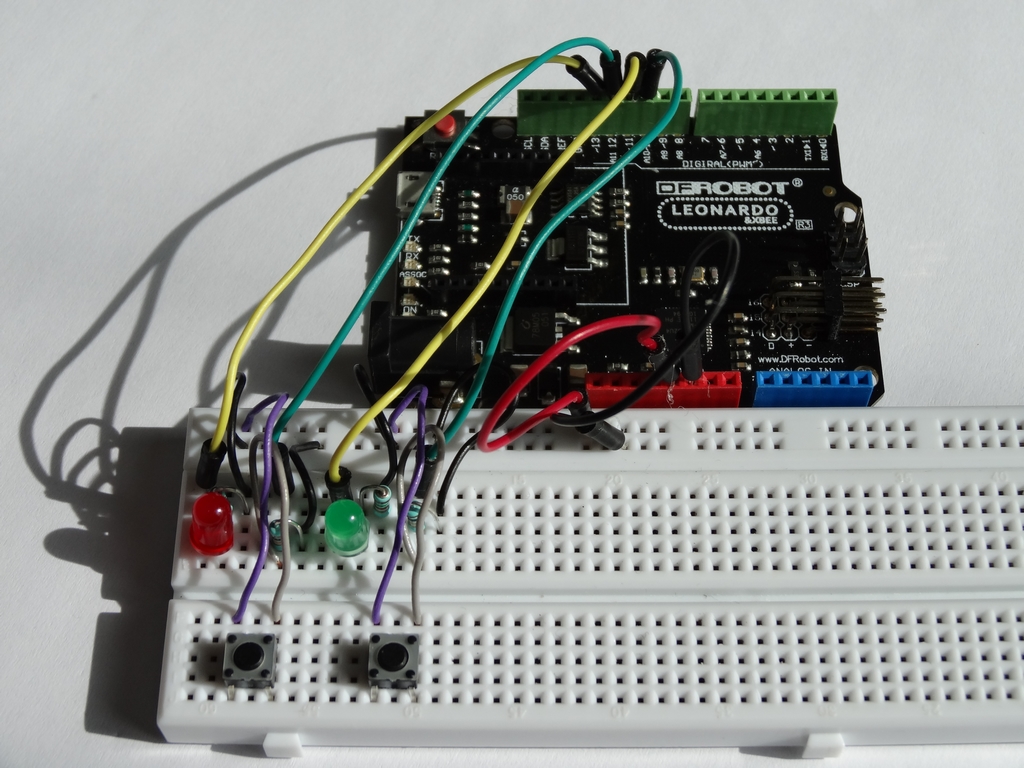
On voit le travail difficile de câblage réalisé sur ce robot par les élèves (Source : Collège Jean Macé)
Fichiers audio
Des fichiers audio utilisés par les élèves (et copiés sur la carte mémoire micro SD du module audio dont la lecture est commandée par la carte électronique programmable).
– 0001 Démarrage. Fichier audio trouvé sur le site universal-soundbank.com (comme les 5 fichiers suivants)
“A l’école ouverte, la semaine du mois d’Aout, nous avons fabriqué et programmé nos propres robots avec pour professeur Mr Pers. Nous avons tout d’abord imaginé des robots pour ensuite savoir comment nous allions les faire : les dimensions, le matériel etc … puis nous avons fabriqué les supports des robots. Lorsque nous avions terminé les supports, nous sommes passés au câblage puis l’habillage.”
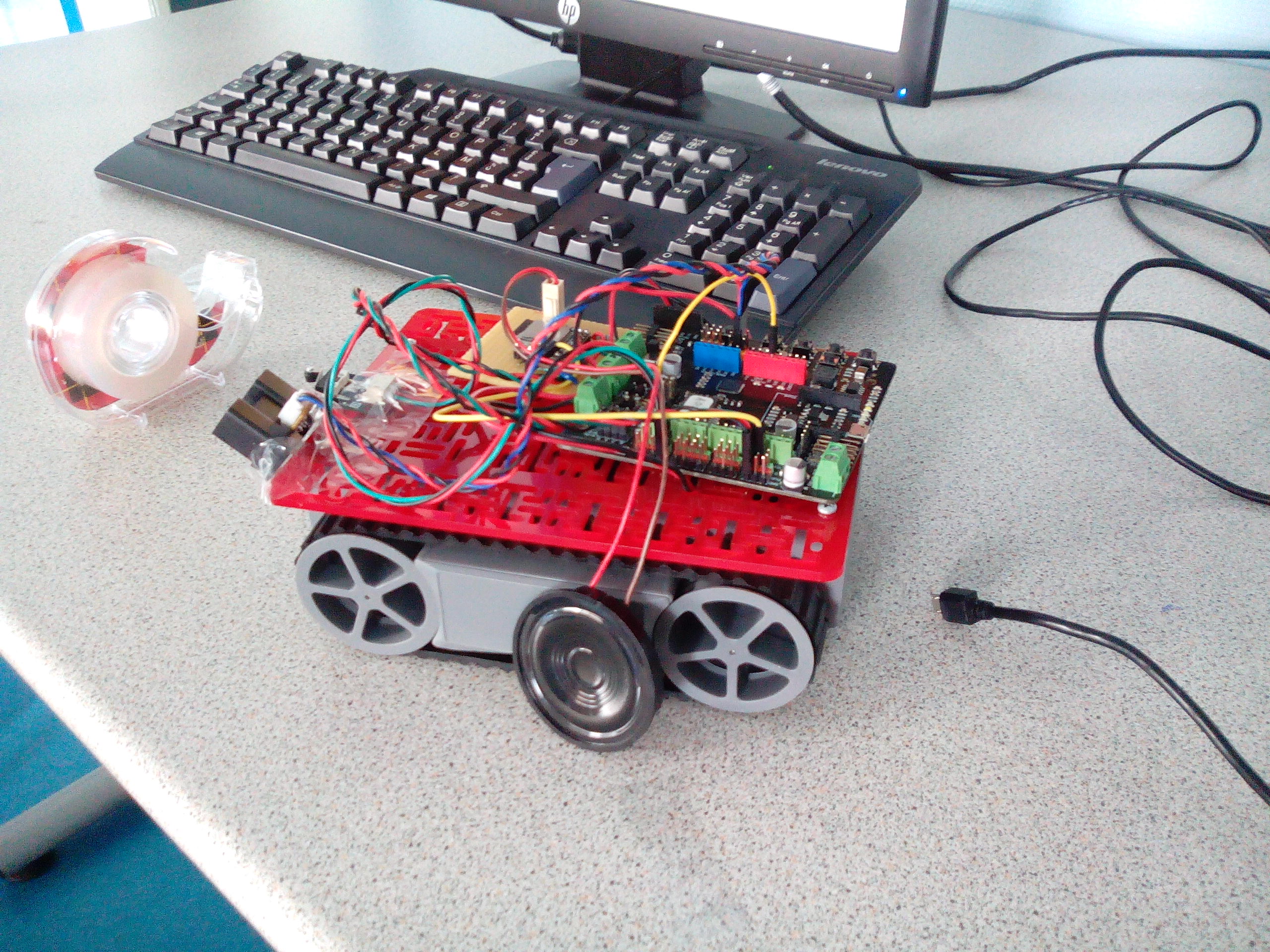
Programmation du robot avec un ordinateur (et câble micro USB débranché ici). Test d’un capteur optique infra rouge (de biais sur la gauche) pour détecter des obstacles (Source : Collège Jean Macé)
Cet article date de juni 2015. Attention, le logiciel Ardublock est en fin de vie. Depuis maintenant deux ans environ, de nouveaux logiciels de programmation ont été développés, la plupart à partir de Blockly conçu spécialement par Google pour faciliter justement le développement de ce type de logiciels pédagogiques. On trouve aujourd’hui des logiciels capables de remplacer avantageusement Ardublock. J’ai choisi d’utiliser Blockly Arduino qui a entre autre l’avantage de pouvoir facilement s’adapter à mes besoins pédagogiques. J’ai rédigé un article qui vous expliquera plus précisément les avantages de Blockly Arduino par rapport à Ardublock, ainsi que les points à améliorer prochainement.
1. Analyse du fonctionnement et des capteurs du robot
Observation d’un robot aspirateur Auto Cleaner, à l’arrêt et en fonctionnement, ainsi que d’un robot aspirateur partiellement démonté.
robot aspirateur autocleaner (source : Collège Jean Macé)
1.1. Fonctionnement de l’aspirateur robot
– Mode S : Le robot décrit une trajectoire en spirale à partir de l’endroit où on l’a déposé. S’il détecte un obstacle (en butant avec son bouclier) alors il s’arrête, recule un peu et repart en changeant de direction.
– Mode M : Le robot nettoie le bord des murs ou des meubles (sur sa droite). Il évite les obstacles comme en mode S.
1.2. Composants permettant au robot d’acquérir des informations
1) Acquisition des commandes de l’utilisateur (le choix du mode de fonctionnement notamment) 3 boutons poussoirs (S, M et L) sur le robot.
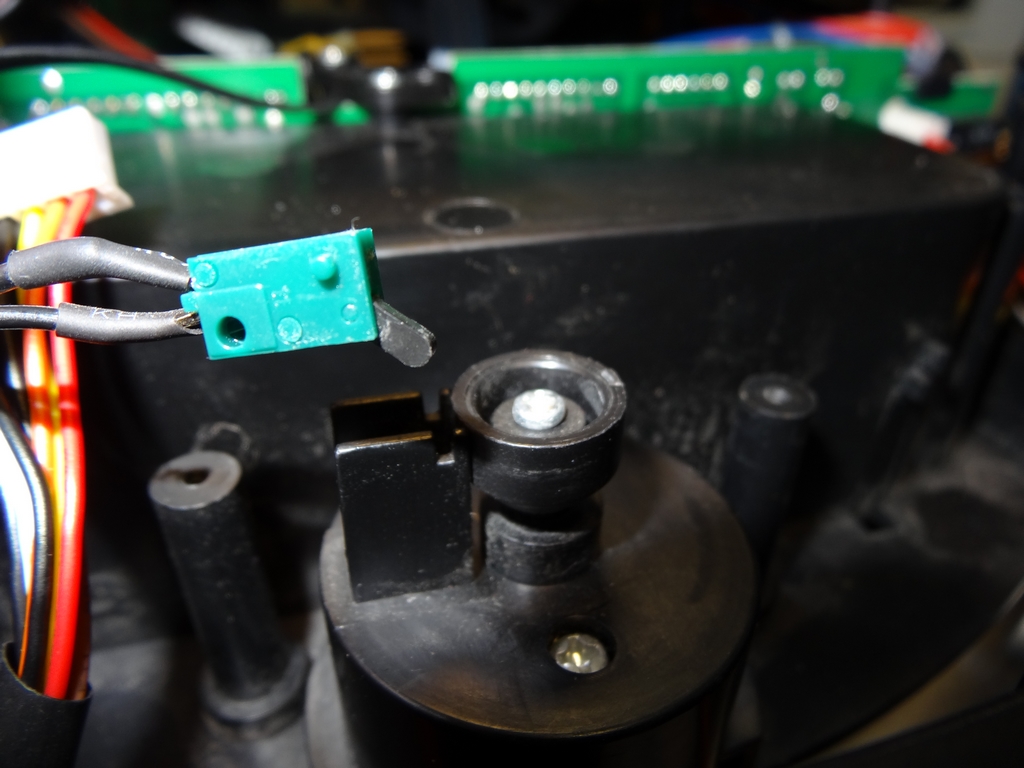
2) Acquisition de la présence d’un obstacle devant le robot Un capteur dans le robot détecte l’enfoncement du bouclier à l’avant du robot.
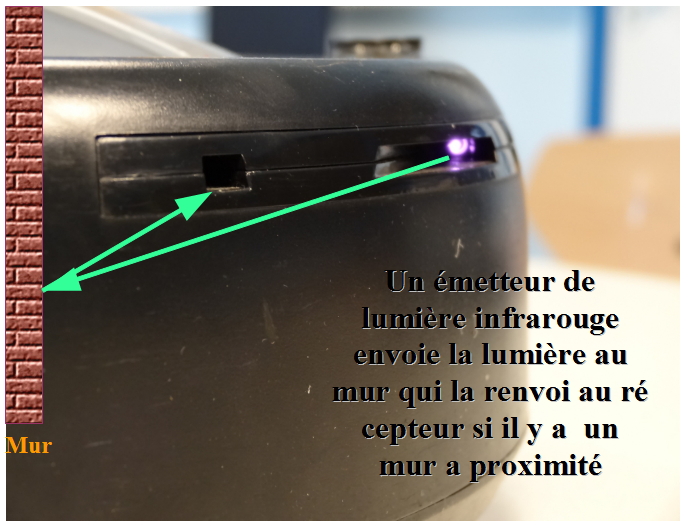
3) Acquisition de la proximité d’un mur à droite du robot Un capteur (infrarouge) sur le côté droit du robot détecte un obstacle à distance (sans contact). Ce capteur est constitué d’un émetteur infrarouge et d’un récepteur infrarouge qui reçoit le faisceau infrarouge réfléchi par le mur (ou l’objet).
4) Acquisition de la présence du vide devant le robot 4 capteurs infrarouges situés sous le bouclier avant, dirigés vers le sol. Il détecte le vide (non présence du sol), sans contact du capteur avec le sol. Chaque capteur est constitué d’un émetteur infrarouge et d’un récepteur infrarouge qui reçoit le faisceau infrarouge réfléchi par le sol (sauf s’il est au-dessus du vide).
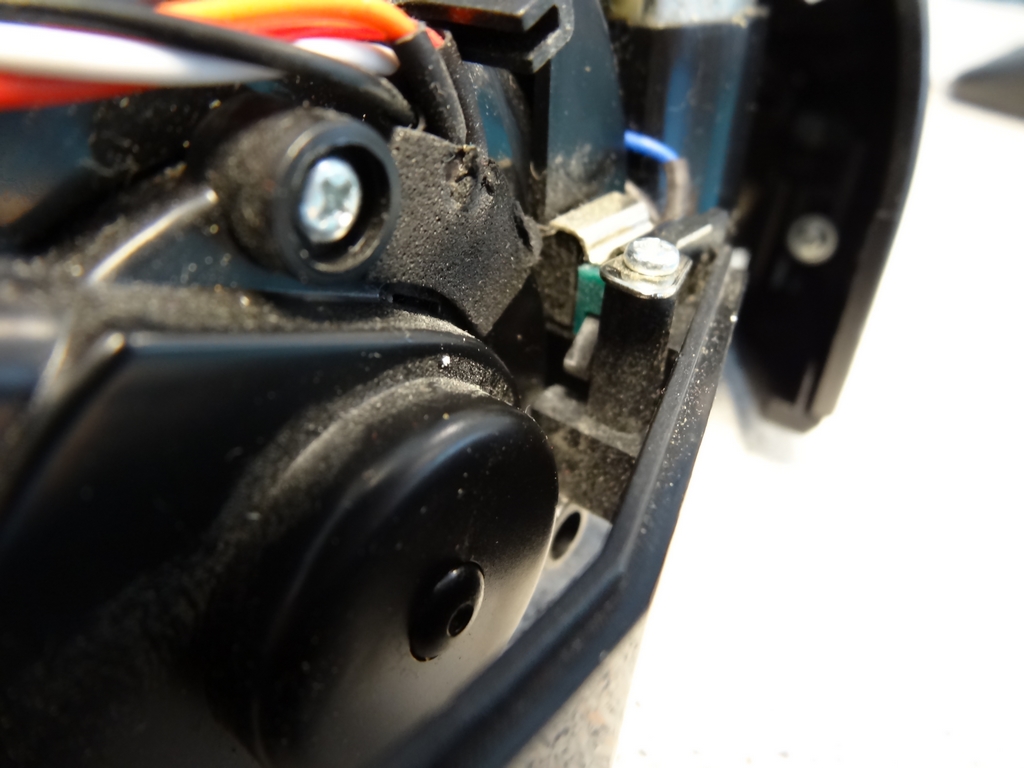
5) Acquisition du soulèvement du robot ou d’une roue dans le vide Un capteur au niveau de chaque roue, y compris de la petite roue non-motrice à l’arrière. Un contact (électrique) est commuté (mécaniquement) par la roue qui se soulève lorsqu’on soulève le robot.
1.3. Composants permettant au robot de transmettre des informations à l’utilisateur
1) Information sur la mise sous tension de l’aspirateur robot (avec le bouton On) La Led verte s’allume sur le robot. Le buzzer émet un son bref.
2) Information de la mise en charge de la batterie (en branchant le bloc secteur) La Led verte sur le robot clignote lentement (environ une fois par seconde).
3) Information de la prise en compte par le robot de l’appui sur un bouton (S, M ou L) La Led bleue sous le bouton enfoncé s’allume. Le buzzer émet un son bref.
1.4. Informations transmises par le robot de manière sonore
La mise sous tension du robot. L’activation d’un mode de fonctionnement. L’attente lorsque le robot est sous tension mais en veille. Le début de la charge.
1.5. Composant permettant au robot de traiter toutes les informations
C’est la carte mère (carte électronique programmable) disposée verticalement dans le robot.
1.6. Alimentation du robot aspirateur en énergie
Energie électrique fournie par la batterie interne au robot.
Elle se recharge sur le chargeur alimenté sur le secteur (réseau 230 V).
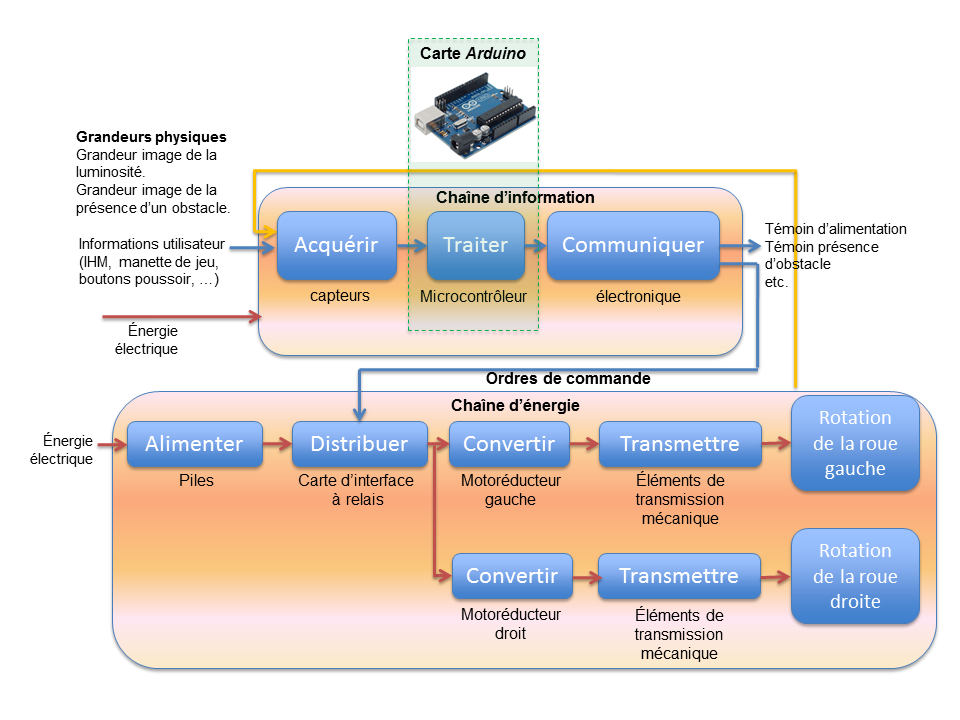
2. Schéma fonctionnel
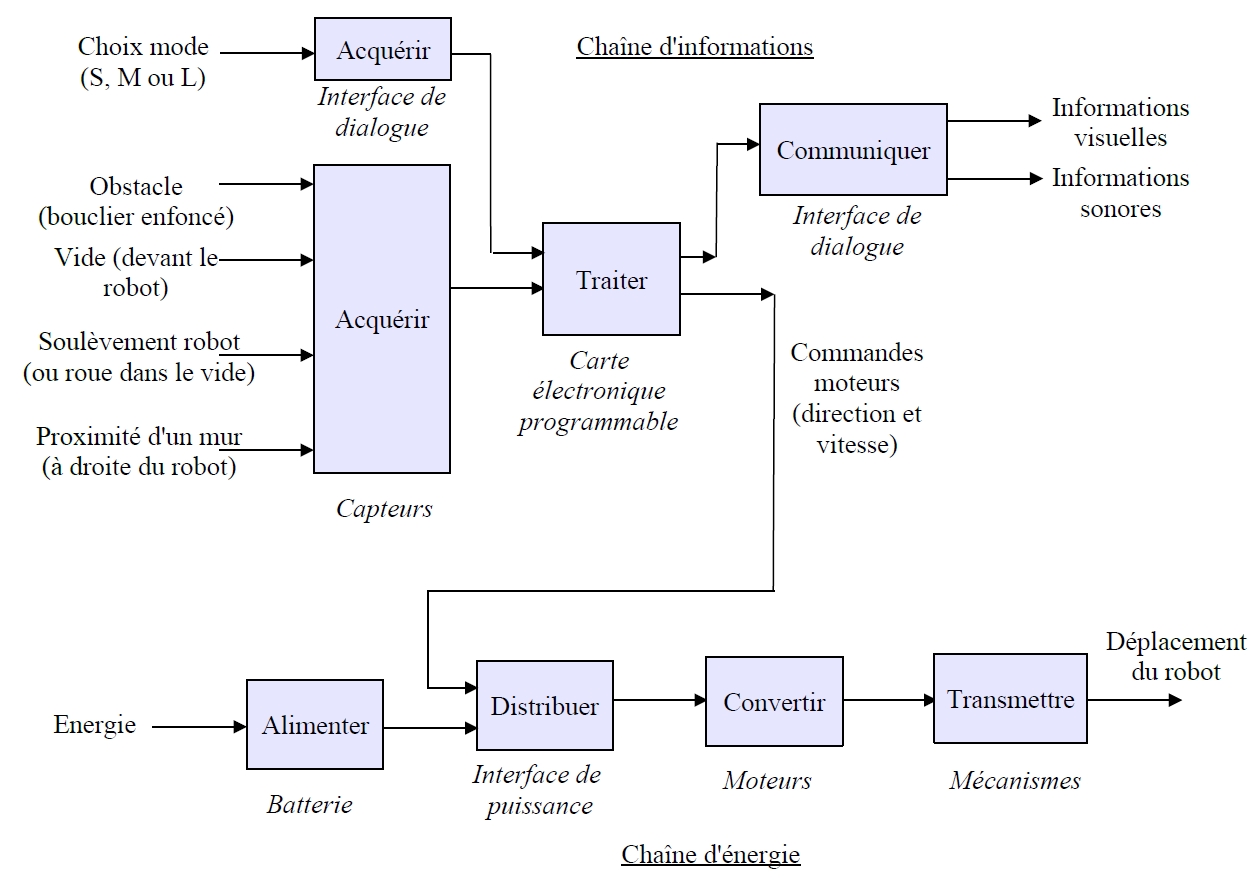
Schéma fonctionnel simplifié de l’aspirateur robot (on ne considère pas ici les moteurs de l’aspiration et des brosses).
Schéma fonctionnel simplifié du robot aspirateur (Source : Collège Jean Macé)
3. Expérimentation avec une carte électronique programmable
L’objectif de cette expérimentation est notamment d’analyser expérimentalement les liens entre la carte électronique de traitement des informations et les fonctions suivantes :
– l’interface de dialogue (boutons et Leds) qui permet à l’utilisateur de choisir un mode de fonctionnement avec des boutons qui s’allument suivant les cas,
– les capteurs qui détectent des obstacles à éviter, – le capteur qui capte la proximité d’un mur (ou d’un meuble) à longer pour assurer le nettoyage,
– un moteur qui permet le déplacement du robot.
3.1. Mise en œuvre d’une carte électronique programmable de type Arduino, avec le logiciel Arduino (+ Ardublock)
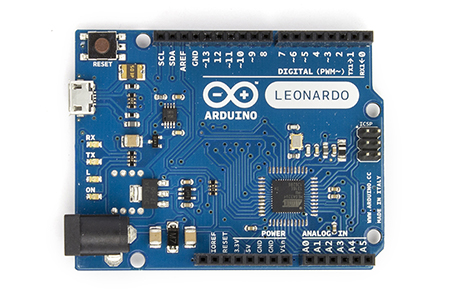
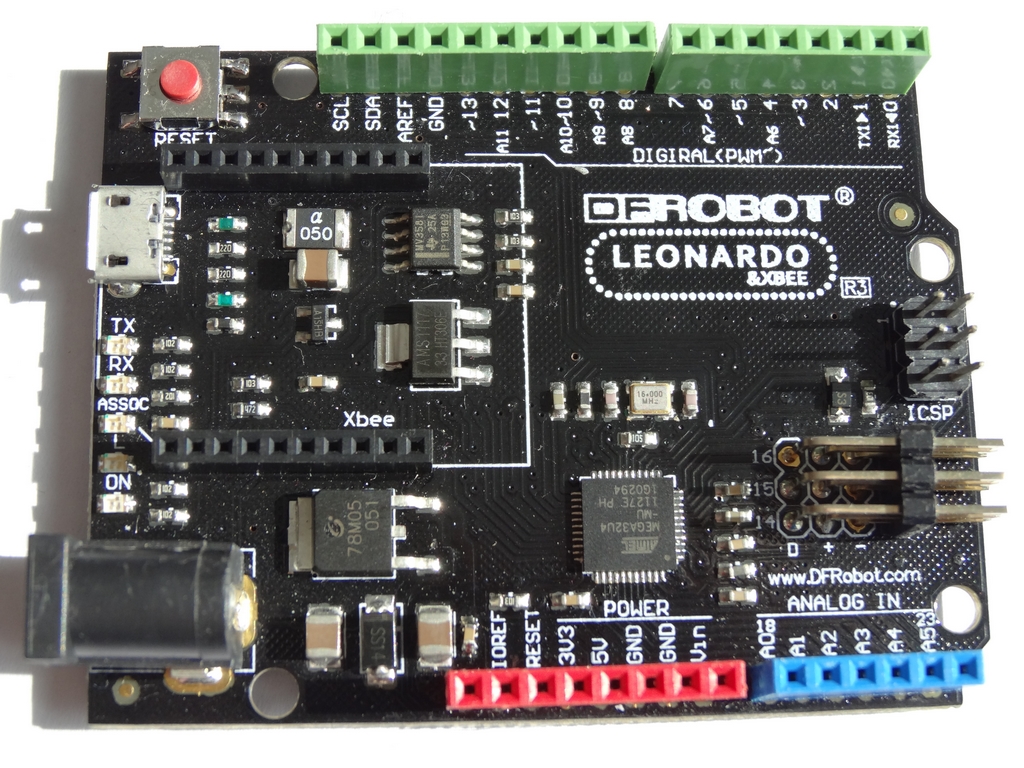
Carte électronique programmable de type Arduino Leonardo (source : Collège Jean Macé)
Interface du logiciel Ardublock pour programmer la carte Arduino (Source Jean Macé)
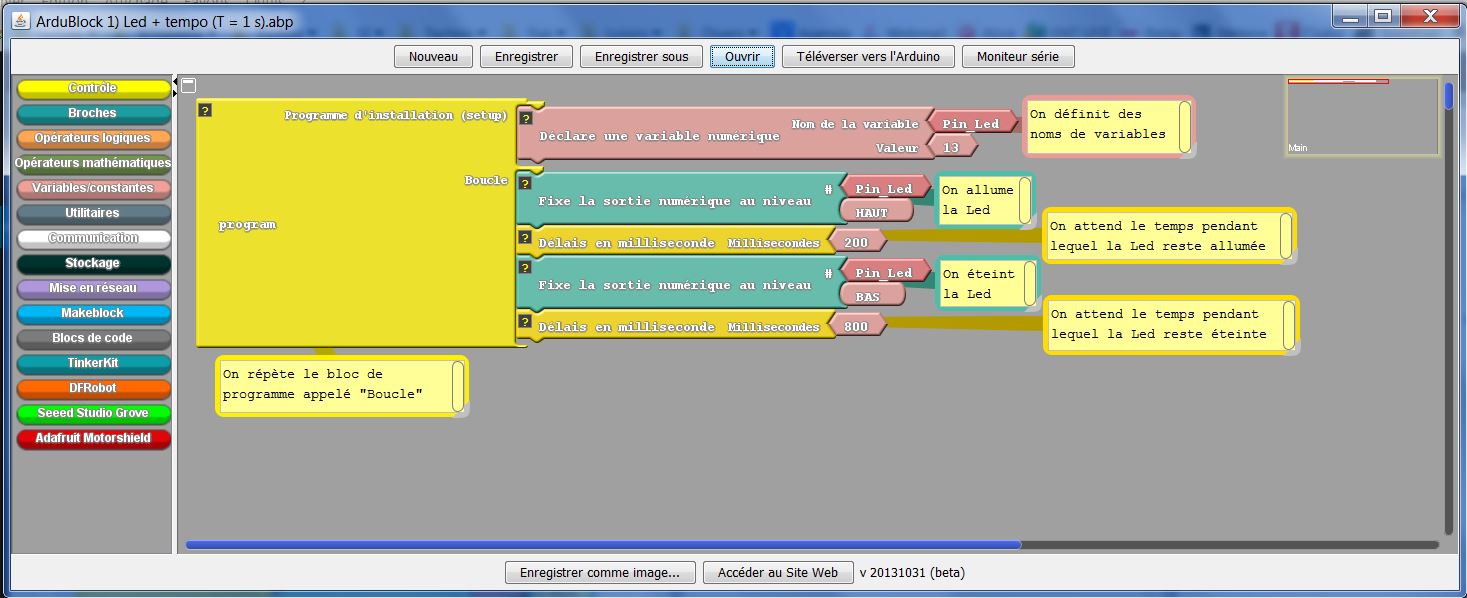
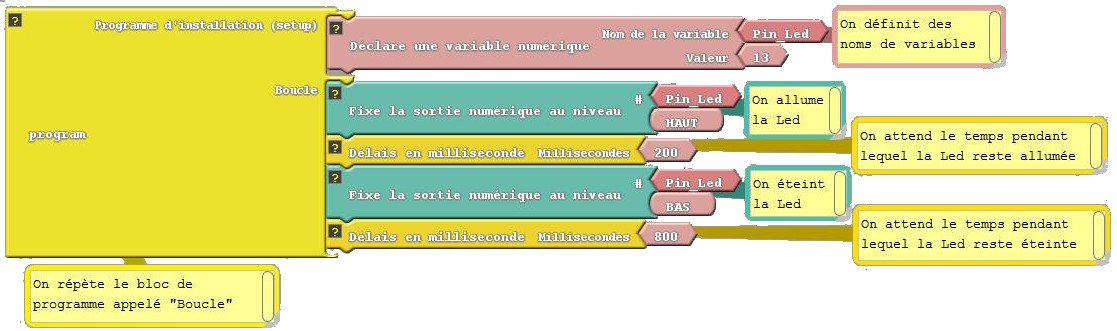
3.2. Programme n°1 : clignotement de la LED de l’aspirateur pendant la phase de charge
Programme (écrit avec Ardublock) de clignotement d’une Led avec une carte électronique programmable Arduino (source : Collège Jean Macé)
3.3. Programme n°2 : Allumer la Led correspondant au mode de fonctionnement choisi lorsqu’on appuie sur le bouton correspondant
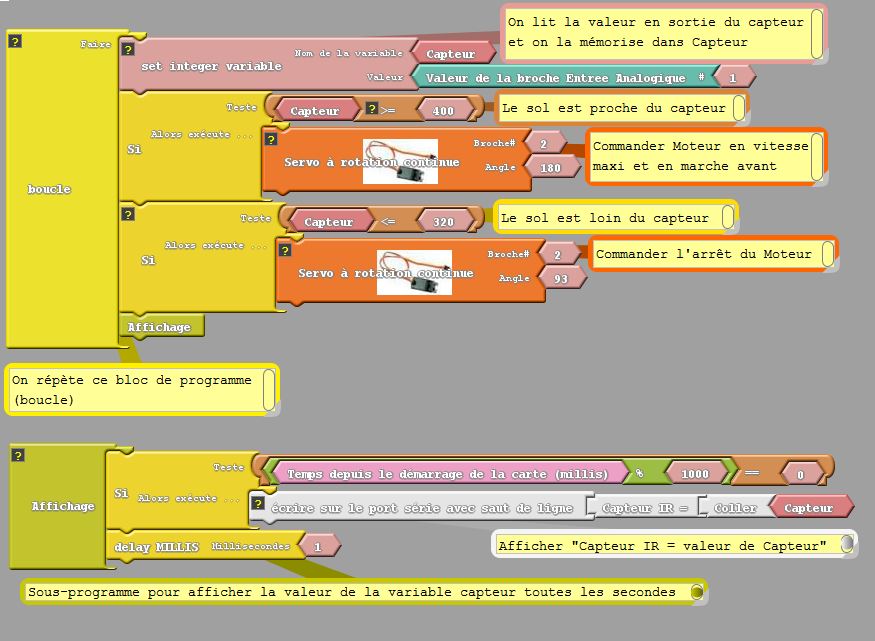
3.4. Programme n°3 : Commander un moteur en fonction d’un capteur qui détecte la présence d’un obstacle
1.1. Lorsque le robot aspirateur était en mode S nous avons observé qu’il faisait des cercles, tournant sur lui-même, tout en déviant de peu sa trajectoire pour qu’il puisse se déplacer pour nettoyer dans toute la pièce. Dès qu’il rencontrait un obstacle, (grâce à ses capteurs) il déviait sa trajectoire.
Bouton allumé en mode “S”
1.2. Lorsque le robot aspirateur était en mode L nous avons observé que dès qu’il rencontrait un obstacle il ne changeait pas de direction mais le longeais. Il sert à nettoyer les coins.
2-Solutions techniques pour acquérir des informations :
2.1. La solution technique retenue pour que l’aspirateur robot puisse acquérir des commandes de l’utilisateur sont les boutons.
2.3. La solution technique retenue pour que l’aspirateur robot puisse détecter la proximité d’un mur à droite du robot sont ses capteurs qui sont équipés d’un rayon infrarouge.
Les capteurs à lumière infrarouge
3-Solutions techniques permettant au robot de communiquer des informations à l’utilisateur sont la lumière et le son.
3.2. La solution technique retenue pour que l’aspirateur robot puisse communiquer à l’utilisateur une information sur la batterie est une LED qui devient rouge lorsque qu’il n’y a plus de batterie.
4. La solution technique permettant au robot de traiter toutes les informations est le processeur.
Alexis M. / Florian G. / Julie O. / Arthur P. / Lakmé B.
1.1 Le fonctionnement de l’aspirateur en mode S : celui-ci fait une rotation sur lui- même
1.2 Le fonctionnement de l’aspirateur en mode L : celui-ci contourne les obstacles
2. Solutions techniques pour acquérir des informations.
2.1 Le choix du mode de fonctionnement et que l’aspirateur contient 3 boutons de commande qui lui permettent d’acquérir les commandes de l’utilisateur donc les ordres que l’utilisateur demande au robot d’effectuer
2.2 La solution technique pour que l’aspirateur puisse détecter la présence d’un obstacle et qu’il le détecte par des capteurs afin que l’aspirateur dévie sa trajectoire
3. Solutions techniques permettant au robot de traiter des informations.
3.1 La solution technique retenue pur que l’aspirateur puisse communiquer a l’utilisateur une information sur la mise sous tension de l’aspirateur robot( avec le bouton On) est que le robot sort un bruitage et une source lumineuse qui indique que le robot pourra traiter des informations.
4. La solution technique permettant au robot de traiter des informations est le processeur.
Cet article date de janvier 2015. Attention, le logiciel Ardublock est en fin de vie. Depuis maintenant deux ans environ, de nouveaux logiciels de programmation ont été développés, la plupart à partir de Blockly conçu spécialement par Google pour faciliter justement le développement de ce type de logiciels pédagogiques. On trouve aujourd’hui des logiciels capables de remplacer avantageusement Ardublock. J’ai choisi d’utiliser Blockly Arduino qui a entre autre l’avantage de pouvoir facilement s’adapter à mes besoins pédagogiques. J’ai rédigé un article qui vous expliquera plus précisément les avantages de Blockly Arduino par rapport à Ardublock, ainsi que les points à améliorer prochainement.
Arduino et Ardublock au collège
Arduino est à la fois un type de cartes électroniques programmables et un logiciel qui permet de travailler avec ces cartes. En plus d’être libre et gratuit, ce logiciel a le gros avantage d’être devenu un standard mondial. Le matériel compatible Arduino est fabriqué aujourd’hui en grande série et distribué à des prix de plus en plus bas par de nombreux fournisseurs.
Le logiciel Arduino a cependant le gros inconvénient de nécessiter une programmation en langage C. Son usage est donc hors programme, aussi bien au collège qu’au lycée. Le logiciel Ardublock est un logiciel libre et gratuit qui permet d’ajouter une interface de programmation graphique au logiciel Arduino. L’écriture des programmes se faut avec des blocs qui s’emboîtent intuitivement comme des pièces d’un puzzle. C’est très simple et ça limite fortement les sources d’erreurs. Ardublock est suffisamment simple et performant pour être utilisé aussi bien au collège qu’au lycée.
Interface graphique d’Ardublock
L’interface graphique d’Ardublock ne possède que 6 boutons (et non pas 6 menus !) situés sur un bandeau en haut de l’interface : difficile de faire plus simple !
Le bouton “Téléverser vers l’Arduino” lance la compilation et uploade le programme dans la mémoire de programme de la carte Arduino.
L’interface graphique d’Ardublock ne possède que 6 boutons (et non pas 6 menus) : difficile de faire plus simple (Source : Collège Jean Macé)
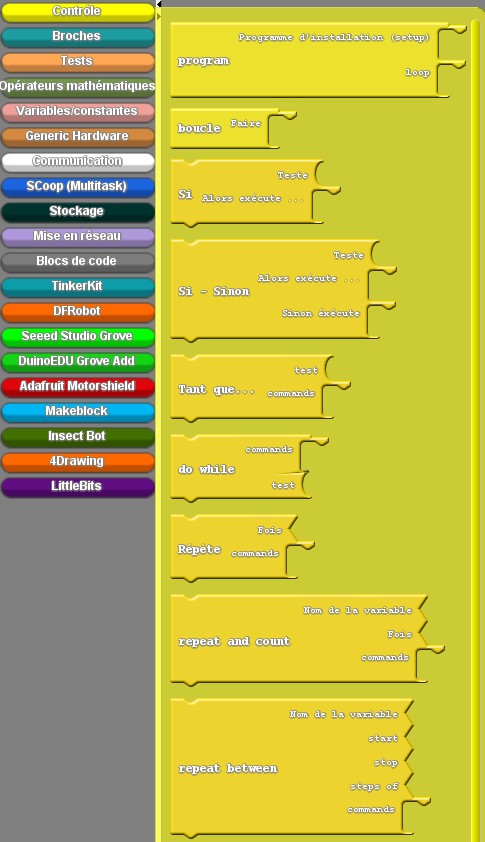
Une liste de librairies situées à gauche avec des boutons colorés permettent d’accéder à des blocs que l’on sélectionne et dépose sur l’espace de travail (cliquer / déposer) situé à droite, pour écrire le programme.
On peut sélectionner le bloc correspondant à la structure de contrôle souhaitée : Boucle faire …, Si … alors …, Tant que … La qualité de la traduction varie en fonction des versions. Des sous-programmes peuvent être réalisés (blocs non visibles sur cette image). (Source : Collège Jean Macé)
Interface graphique d’Ardublock, avec un programme pour faire clignoter une LED sur la broche 13. Des commentaires ont été ajoutés, ici en jaune pâle (ils peuvent être masqués éventuellement). Cliquer sur l’image pour zoomer. (Source : Collège Jean Macé)
Les blocs s’emboitent comme des pièces de puzzle de manière à empêcher la plupart des erreurs de syntaxe. Déplacer ou copier des blocs se fait très simplement. Pour supprimer des blocs, on les glisse en dehors de l’espace de travail, tout simplement.
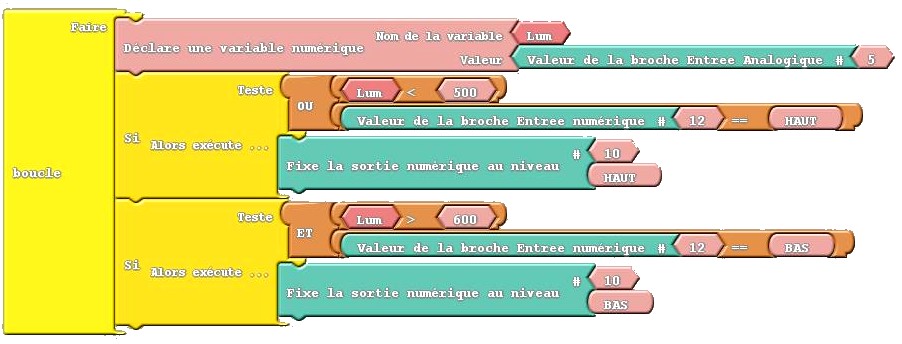
Autre exemple de programme écrit avec Ardublock : commande de la sortie 10 (lampe par exemple) à partir d’un capteur de lumière (entrée 5 mémorisée dans la variable Lum) avec deux seuils (< 500 ou > 600) et/ou de l’entrée 12 (bouton poussoir par exemple). Cliquer sur l’image pour zoomer. (Source : collège Jean Macé)
Le matériel de base pour utiliser Arduino au collège
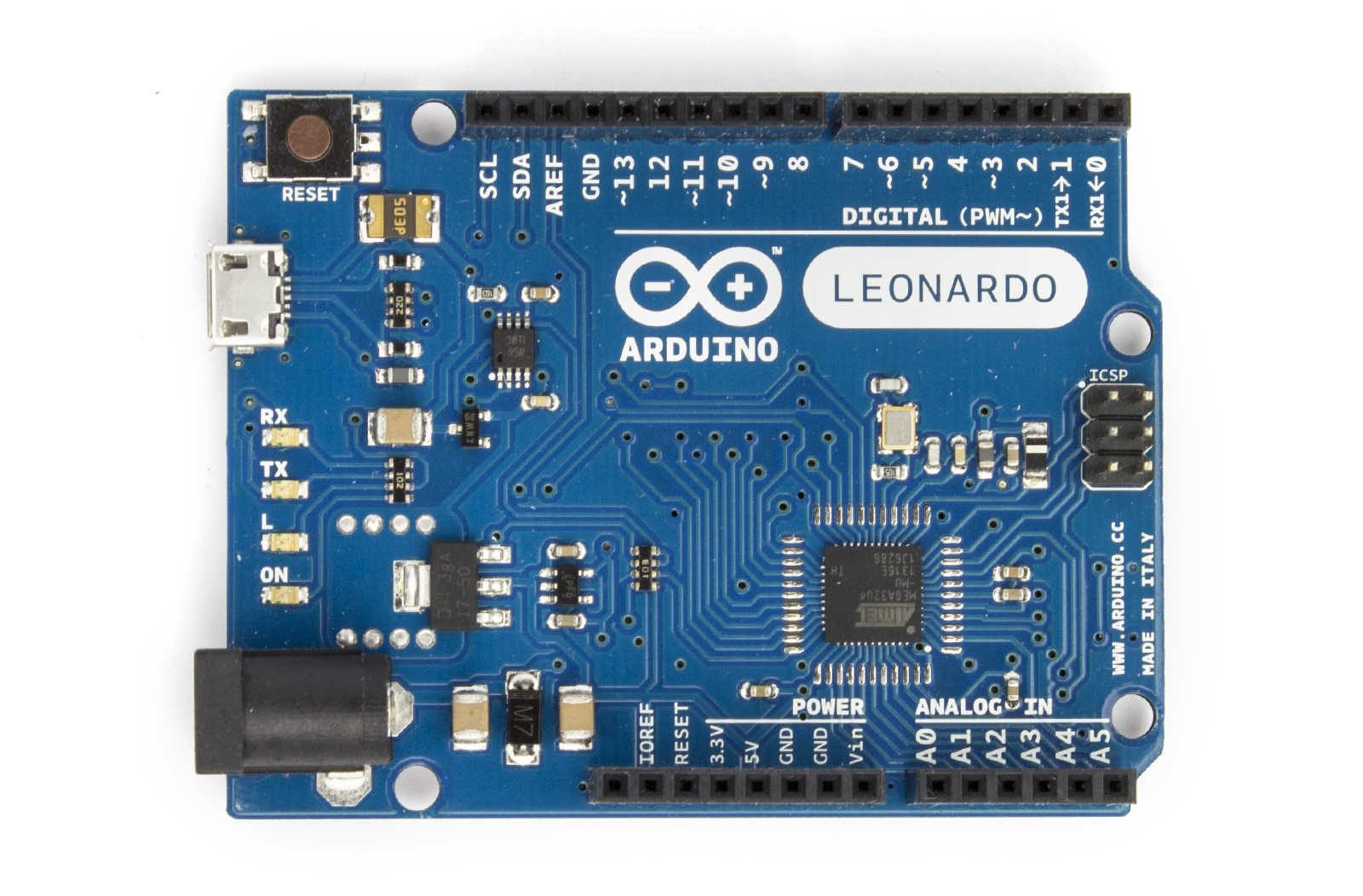
La carte Arduino de base disponible actuellement s’appelle l’Arduino Leonardo. Elle est amplement suffisante pour gérer la plupart des projets que nous menons au collège. Elle coûte environ 20 € TTC. Un câble micro USB standard (celui de votre smartphone par exemple) suffit pour l’alimenter, la programmer, communiquer avec le PC, …
Carte Arduino Leonardo (Source : arduino.cc)
Il existe des variantes de cette carte Arduino Leonardo. J’apprécie celle développée par DF Robot qui utilise des connecteurs de couleurs et qui a ajouté un connecteur qui permet d’ajouter notamment un module Bluetooth, tout en étant moins cher que la version de base (18 € TTC chez Gotronic le 18/1/15) :
Carte Arduino Leonardo DFRobot DFR0221 (Source : dfrobot.com)
Il suffit de brancher en USB une carte Arduino sur le PC qui installera les drivers (3).
“Installation” d’Ardublock
Il faut intégrer Ardublock au logiciel Arduino installé au préalable sur un PC (ou un MAC, …). La solution que j’utilise est la suivante :
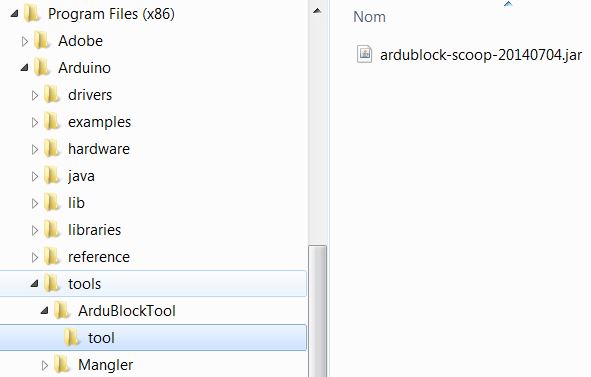
Après avoir installé Arduino, créer dans le dossier Program Files (x86) / Arduino / Tools, l’arborescence “ArduBlockTool / tool” puis coller dans “tool” l’application java d’Ardublock (fichier avec l’extension .jar).
J’ai intégrée la version du 04/07/2014 dans le fichier ci-dessous que vous pouvez directement décompresser et coller dans le dossier “Program Files (x86) / Arduino / Tools”. Rien d’autre à faire !
ArduBlockTool.zip (à décompresser et à coller dans “Program Files (x86) / Arduino / Tools”).
Arborescence Arduino pour l’installation du plugin Ardublock (Source : Collège Jean Macé)
Mise en œuvre d’une carte Arduino avec le logiciel Arduino (+ Ardublock)
1. Connecter la carte Arduino à l’ordinateur avec un câble USB / mico USB.
2. Ouvrir le programme Arduino (raccourci sur le bureau).
3. Dans le menu “Outils” sélectionner : Type de carte / Arduino Leonardo.
4. Dans le menu “Outils”, sélectionner le Port série correspondant à la carte Arduino. C’est normalement le dernier avec la chiffre le plus élevé (il est possible de le vérifier dans le gestionnaire de périphériques).
5. Dans le menu “Outils” sélectionner Ardublock.
Test et modifications de quelques programmes fournis
1. Copier le répertoire contenant les programmes à tester ou à modifier, dans le répertoire de travail de votre choix.
Quelques exemples de programmes sont disponibles dans le dossier ci-dessous (à décompresser) : Prog Ardublock 18_01_15.zip
D’autres exemples de programmes seront fournis prochainement.
2. Dans Ardublock, cliquer sur “Ouvrir” puis sélectionner le premier programme à tester, Prog 1, dans votre répertoire de travail.
3. Cliquer sur “Téléverser vers l’Arduino” pour générer le programme (compilation) et l’envoyer dans la mémoire du processeur de la carte électronique programmable.
Remarque l’avancement de la compilation et du téléversement ne sont visibles que dans la fenêtre d’Arduino qui peut être regardée à cette occasion.
L’exécution se lance ensuite automatiquement. Le PC peut éventuellement être déconnecté, à condition de conserver une alimentation (USB ou coaxiale).
4. Observer le fonctionnement obtenu et comparer avec le fonctionnement souhaité.
5. Modifier le programme de manière à obtenir le fonctionnement souhaité.
Dans le programme n°1 fournis, modifier les durées lorsque la Led est allumée ou éteinte : cliquer sur la valeur à modifier, la modifier puis taper sur Entrer. Enregistrer éventuellement (bouton Enregistrer).
6. Tester à nouveau le programme en cliquant sur “Téléverser vers l’Arduino”. Modifier à nouveau le programme si nécessaire.
Interface graphique d’Ardublock, avec le programme n°1 qui permet de faire clignoter une LED sur la broche 13. Des commentaires ont été ajoutés, ici en jaune pâle (ils peuvent être masqués éventuellement (Source : Collège Jean Macé)
Programme n°2 qui permet de piloter un servomoteur à rotation continue en fonction du niveau d’un capteur infra-rouge (représentatif d’un capteur de vide d’un aspirateur robot). (Source : Collège Jean Macé)
Nous souhaitons équiper le collège Jean Macé d’une imprimante 3D. Lors d’une réunion avec des professeurs de Technologie collège de la Vienne, un modèle nous a été conseillé, la Tobeca 2. Je me suis donc intéressé à cette imprimante 3D que je vous présente dans cet article.
Qu’est-ce qu’une imprimante 3D ?
C’est une machine capable de fabriquer des objets, en plastique dans notre cas, en déposant de la matière plus ou moins liquide, du plastique fondu dans notre cas, comme le ferait une imprimante de bureau avec de l’encre. Mais au lieu de se limiter à une couche de matière déposée sur une surface plane, la machine est capable de gérer des déplacements dans une troisième direction pour déposer successivement de très fines couches de matière, les une sur les autres. L’imprimante réalise ainsi un objet en 3 dimensions à partir d’un modèle dessiné avec un ordinateur, avec un logiciel comme Google Sketchup ou SolidWorks par exemple. Ce procédé permet de fabriquer directement des objets aux formes complexes mais il a l’inconvénient d’être très long : entre une dizaine de minutes et quelques heures suivant la taille de l’objet à imprimer (mais dépend peu de la complexité de la pièce). Une imprimante 3D ajoute progressivement de la matière alors qu’une machine à commande numérique, comme CharlyRobot, part d’un bloc de matière brute dans lequel il enlève progressivement de la matière, avec une fraise par exemple.
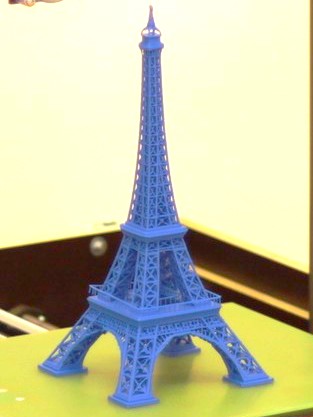
Tour Eiffel en plastique en 3 dimensions, d’environ 20cm de haut, imprimée en près de 5h avec une imprimante 3D (Source : Tobeca.fr)
Le modèle 3D utilisé pour imprimer cette tour Eiffel (Source : thingiverse.com)
Vidéo de présentation de l’imprimante 3D Tobeca 2 (Source : YouTube, Adrien Grelet) :
Voici une autre petite vidéo (source : MakerShop.fr) qui montre la fabrication d’un petit vase en plastique avec une imprimante 3D, l’ancien modèle Tobeca 1. Attention, cette vidéo est en partie en vitesse accélérée :
La société Tobeca
Tobeca est une startup (jeune entreprise) créée en octobre 2013 par Adrien Grelet (DUT Génie Electrique et Informatique Industrielle de Tours) qui conçoit et commercialise des imprimantes 3D open source (matériel et logiciels sont libres) et peu chers. Tobeca se situe à Vendôme (entre Tours et Chartres). Elle privilégie qualité et simplicité pour le particulier et les PME.
Le modèle Tobeca 2 est sorti le 15 juillet 2014. Il ne coûte que 999 € (en version de base, monté et testé). Cette imprimante utilise des bobines de filament en plastique, notamment du PLA (plastique produit à partir d’amidon de maïs et biodégradable). Une bobine de 880 g de PLA 1.75 mm coûte 29 €, soit 33 € le kilo, et devrait suffire pour une année d’utilisation (Source : Tobeca.fr).
Quelques caractéristiques de l’imprimante 3D Tobeca 2
Dimensions (avec bobine) et poids : 440 x 450 x 460 mm, 10 kg
Volume d’impression (X, Y, Z) : 200 x 200 x 250 mm soit 10 000 cm3, ou 1 litre
Plus petits déplacements possibles : 0,015 mm soit 15 µm (en théorie, car en pratique c’est 0,1 mm soit 100 µm)
Épaisseurs de couches : 0,10 mm à 0,30 mm soit 100 à 300 µm (en fonction de la qualité choisie)
Vitesses d’impression : jusqu’à 200 mm/s (en fonction de la qualité choisie)
L’imprimante 3D Tobeca 2 vient d’imprimer une tour Eiffel en plastique de 20cm de haut, couche par couche, en près de 5h (Source : tobeca.fr)
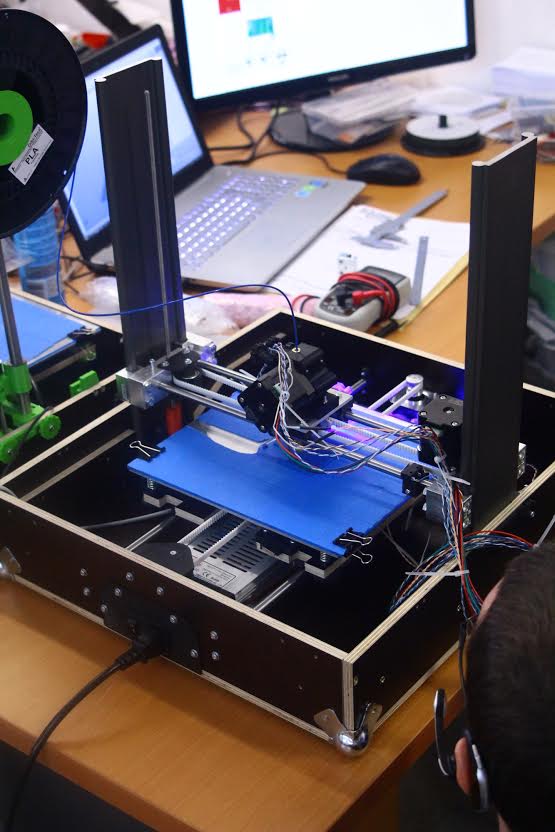
Prototype de la Tobeca 2 vue de l’arrière : les fils ne sont pas gainés ici (Source : 3dprint.com)
Prototype de la Tobeca 2 vue de l’avant : les fils ne sont pas gainés ici. (Source : 3dprint.com)
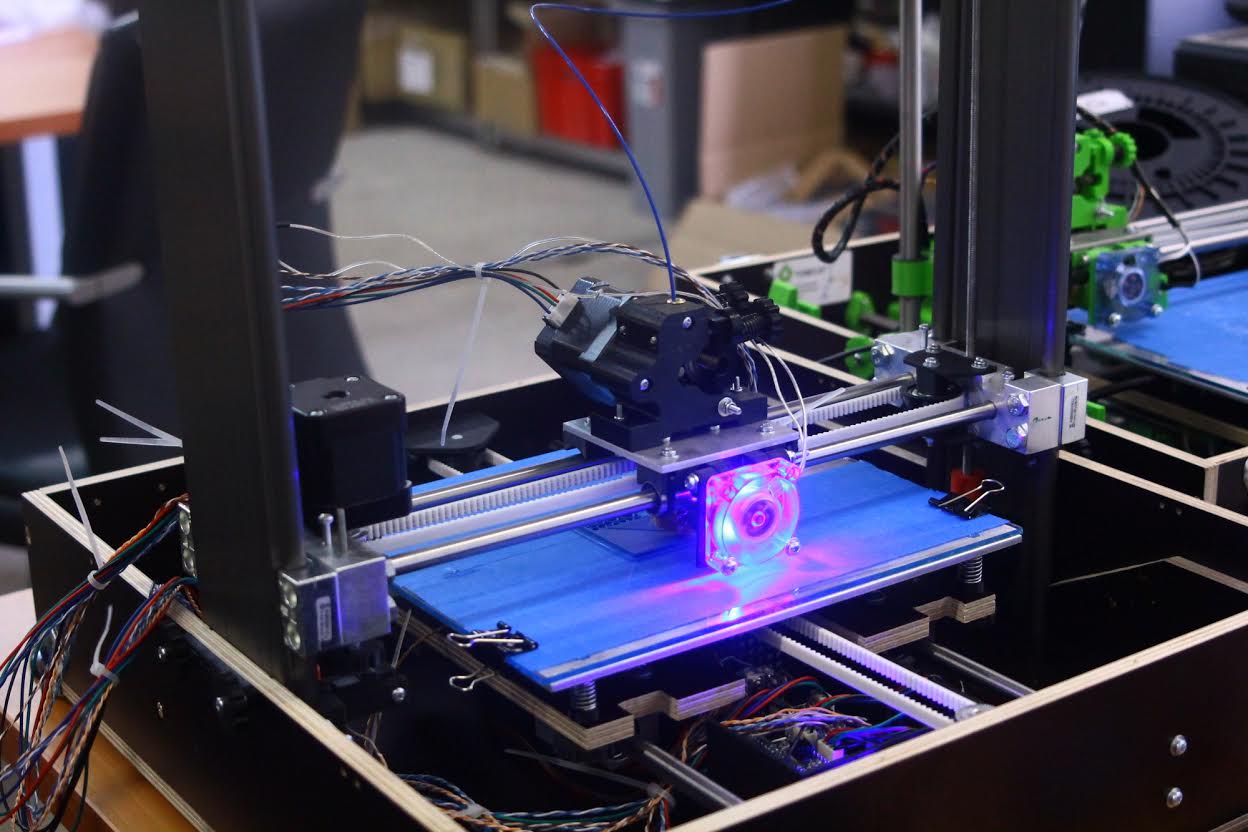
Tobeca 2 : la tête d’impression est refroidie avec un ventilateur de 40 mm. Les fils sont gainés sur ce modèle de série. (source : makerfaireparis.com)
Prototype de la Tobeca 2 : Lorsque la machine est repliée pour le transport, on voit bien le mécanisme d’entrainement de la tête d’impression (Source : Tobeca.fr)
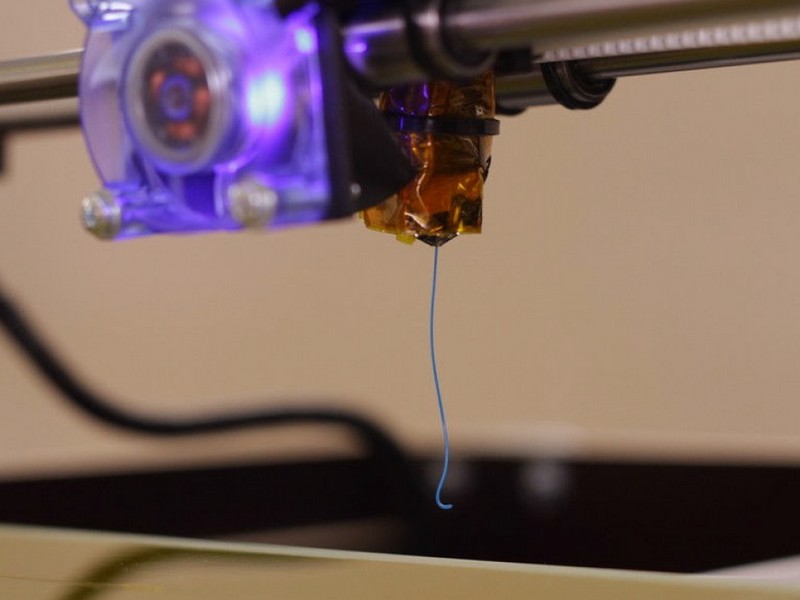
La tête d’impression refroidie par un ventilateur de 40 mm avec la buse de 0,4 mm d’où sort un fil de plastique fondu (du PLA) lors de l’initialisation de la machine (Source : Guide d’utilisation Tobeca.fr)
Une bobine de 880 g de PLA 1.75 mm coûte 29 € et devrait suffire pour une année d’utilisation (Source : Tobeca.fr)
Une imprimante 3D libre
Ctte imprimante est libre et diffusée sous la licence Open Source Creative Commons Non Commerciale. L’imprimante peut être étudiée, modifiée, répliquée, de manière libre à partir des fichiers sources (matériel et logiciel) fournis.
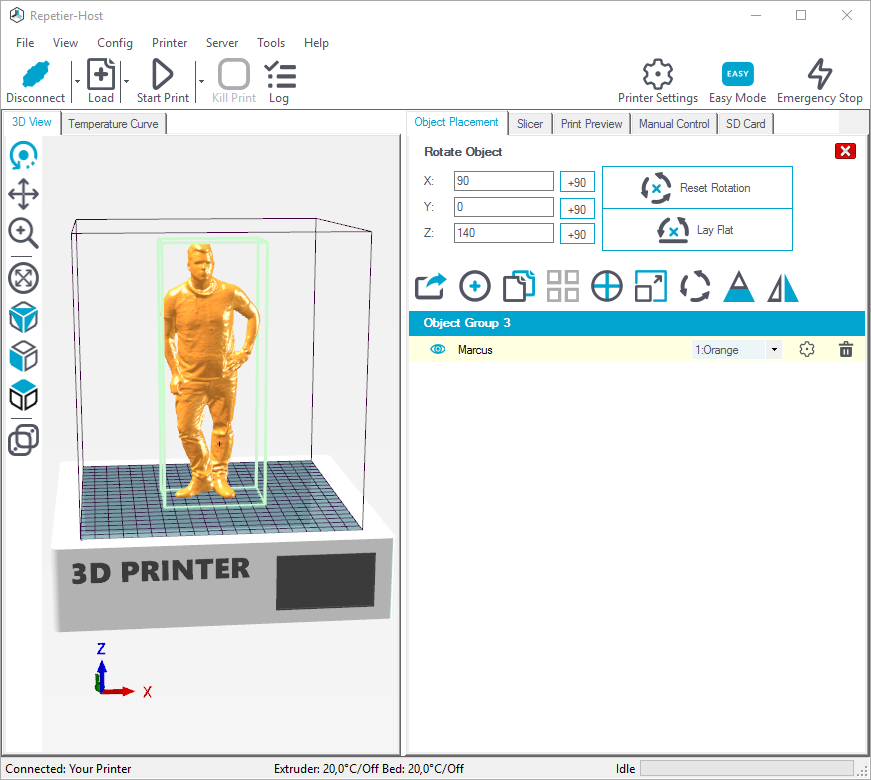
Repetier Host est le logiciel libre utilisé par Tobeca (Source : repetier.com)
Principaux atouts de cette imprimante 3D
– Low-cost mais performante Cette imprimante 3D Tobeca 2 est une des moins chères de sa catégorie (999 € montée) et possède cependant de très bonnes performances avec notamment un bon volume d’impression de 10 000 cm3 (20 x 20 x 25 cm) et une bonne résolution (couches de 100 µm d’épaisseur et 15 µm de résolution horizontale). Elle est peu encombrante et facile à transporter (dans sa mallette support) alors qu’elle possède un assez grand volume d’impression.
– Pédagogique : Elle n’a pas de capot ce qui permet aux élèves de bien visualiser son fonctionnement mais aussi les solutions techniques retenues pour sa conception (moteurs, transmission, guidages, circuit de gestion de l’énergie, …).
– Simple : Elle semble simple d’utilisation : profils d’impression pré-configurés, logiciel tout en un pour imprimer en 3 clics.
– Bon support client Le SAV est proche et réactif (merci à M Grelet, le dirigeant de Tobeca, pour sa disponibilité) : Tobeca est à Vendôme entre Tours et Chartres. La garantie est de 1 an, extensible à 3 ans pour seulement 100 €. Le forum de Tobeca est actif.
L’aventure humaine de la startup Tobeca
Le développement des imprimantes 3D par Tobeca est directement liée au projet RepRap qui consiste à concevoir des imprimantes 3D pour fabriquer chez soi des objets, mais aussi des pièces pour répliquer l’imprimante 3D. Adrien Grelet, diplômé de l’IUT de Génie Electrique et Informatique Industrielle de Tours, a conçu une première imprimante 3D, puis a créé en octobre 2013 la start-up Tobeca à Vendôme. Il a ensuite conçu et commercialisé l’imprimante Tobeca, première du nom, vendue à plus de 150 exemplaires. Fort de ce succès, il a conçu la version 2 de cette imprimante, la Tobeca 2, commercialisée depuis le 15 juillet 2014. Lien vers une petite vidéo (4 min) du 5 mai 2014 qui présente le début de cette formidable aventure humaine (Source : JeunesOCentre.fr) :
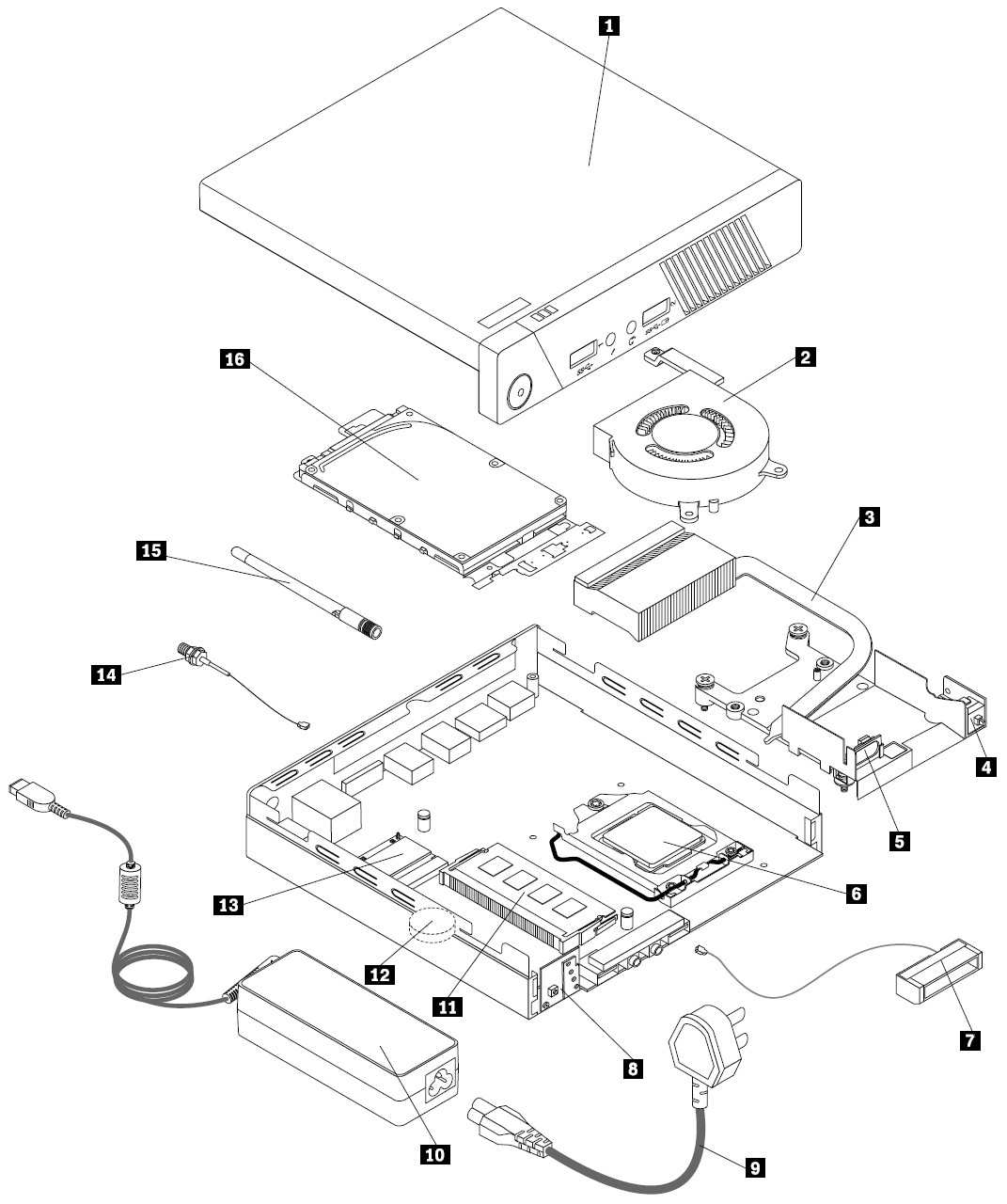
La salle de Technologie est équipée cette année de nouveaux ordinateurs compacts, de type mini PC. Ce sont des Lenovo M73 (version 10AX)
Unité centrale Lenovo M73. De gauche à droite : bouton Marche/arrêt (avec film de protection encore présent), port USB, entrée microphone, sortie casque audio, deuxième port USB, grille pour l’entrée d’air du système de refroidissement. (Source : Collège Jean Macé)
Unité centrale Lenovo M73 vue de l’arrière. De gauche à droite : connecteur pour l’alimentation externe, display port (pour un écran DVI avec un adaptateur), 2 ports USB, port VGA pour un écran, prise réseau Ethernet RJ45, port USB. (Source : Collège Jean Macé)
Configuration et caractéristiques
. Processeur dual core Intel Pentium G3220T : cache 3 Mo, 2.6 GHz, 22 nm, architecture Haswell, basse consommation (< 35W )
. Carte mère Intel H81 au format mini ITX
. Ports : 5 USB 2.0, VGA intégré, microphone, DisplayPort intégré, connecteur audio mixte écouteurs/micro, RJ45
. Extension : 1 PCI Express mini
. 4 Go de mémoire RAM SODIMM DDR3 PC3-12800 1600 MHz (2 slots utilisés sur 2 disponibles)
. Circuit graphique intégré au processeur : GPU Intel HD Graphics 2500 (Haswell), 200MHz (1100 MHz maxi)
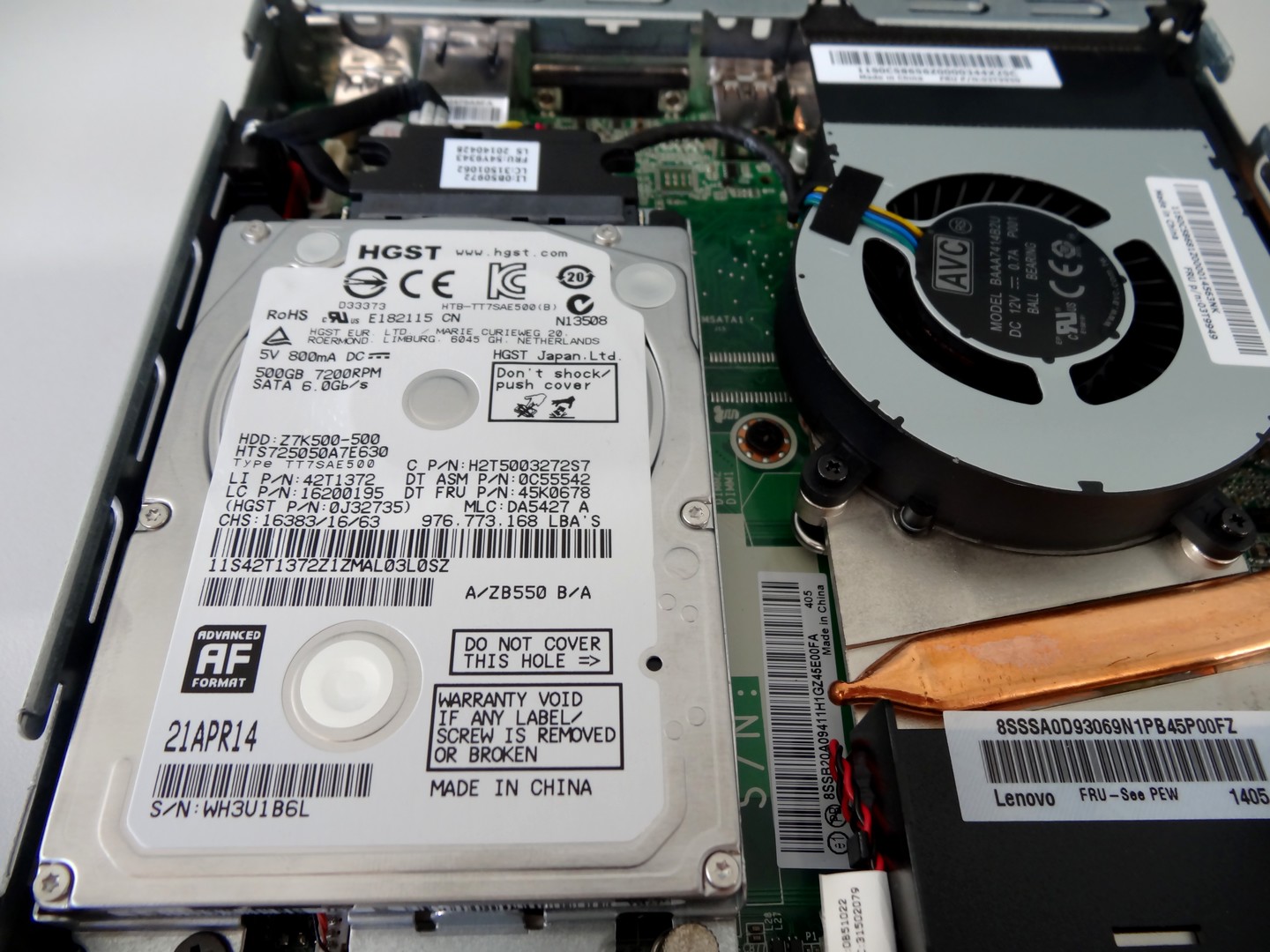
. Disque dur 500 Go, 7200 tr/min, 2.5 pouces, SATA 3
. Réseau : Ethernet Gigabit Intel intégré au processeur, 10/100/1000 Mbits/s
. Audio : carte son Realtek® ALC662 avec haut parleur interne
. Alimentation externe de 65 W avec efficacité énergétique de 87%
. Boitier Tiny : 184 x 182 x 65 mm, 1 litre, 1,32 kg
. Clavier USB de taille standard – Français
. Souris optique améliorée USB
. Windows 7 Professionnel 64 bits
. Garantie 3 ans sur site
. Certifications environnementales : ENERGY STAR 5.2, EPEAT® Or et UL Environment Gold (efficacité énergétique, utilisation de matière recyclée, SAV, …).
. Prix : environ 420 € TTC pour une pièce, chez shop.lenovo.com . Même prix environ chez l’UGAP (centrale d’achat public) d’où proviennent nos mini PC.
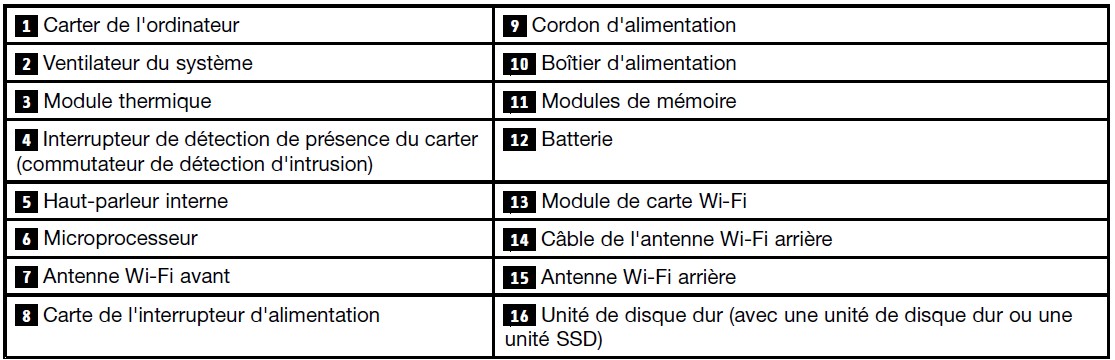
Localisation des composants : page 26 du manuel d’utilisation du Lenovo M73. Voir légende sur l’image suivante. (Source : cc.cnetcontent.com)
Localisation des composants : page 27 du manuel d’utilisation du Lenovo M73 (Source : cc.cnetcontent.com)
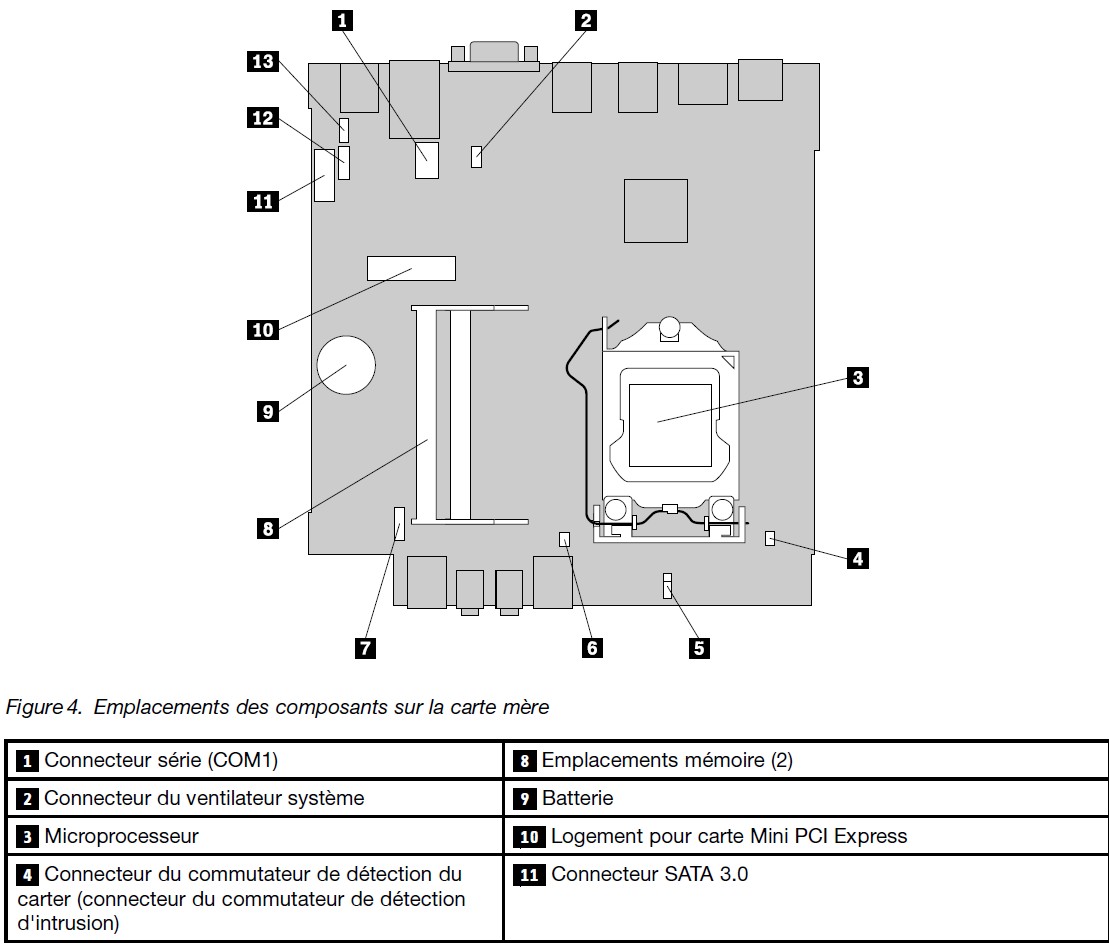
Carte mère du Lenovo M73 : page 27 du manuel d’utilisation du Lenovo M73 (Source : cc.cnetcontent.com)
Unité centrale Lenovo M73 ouverte avec disque dur déposé, l’avant est en bas de l’image. (Source : collège Jean Macé)
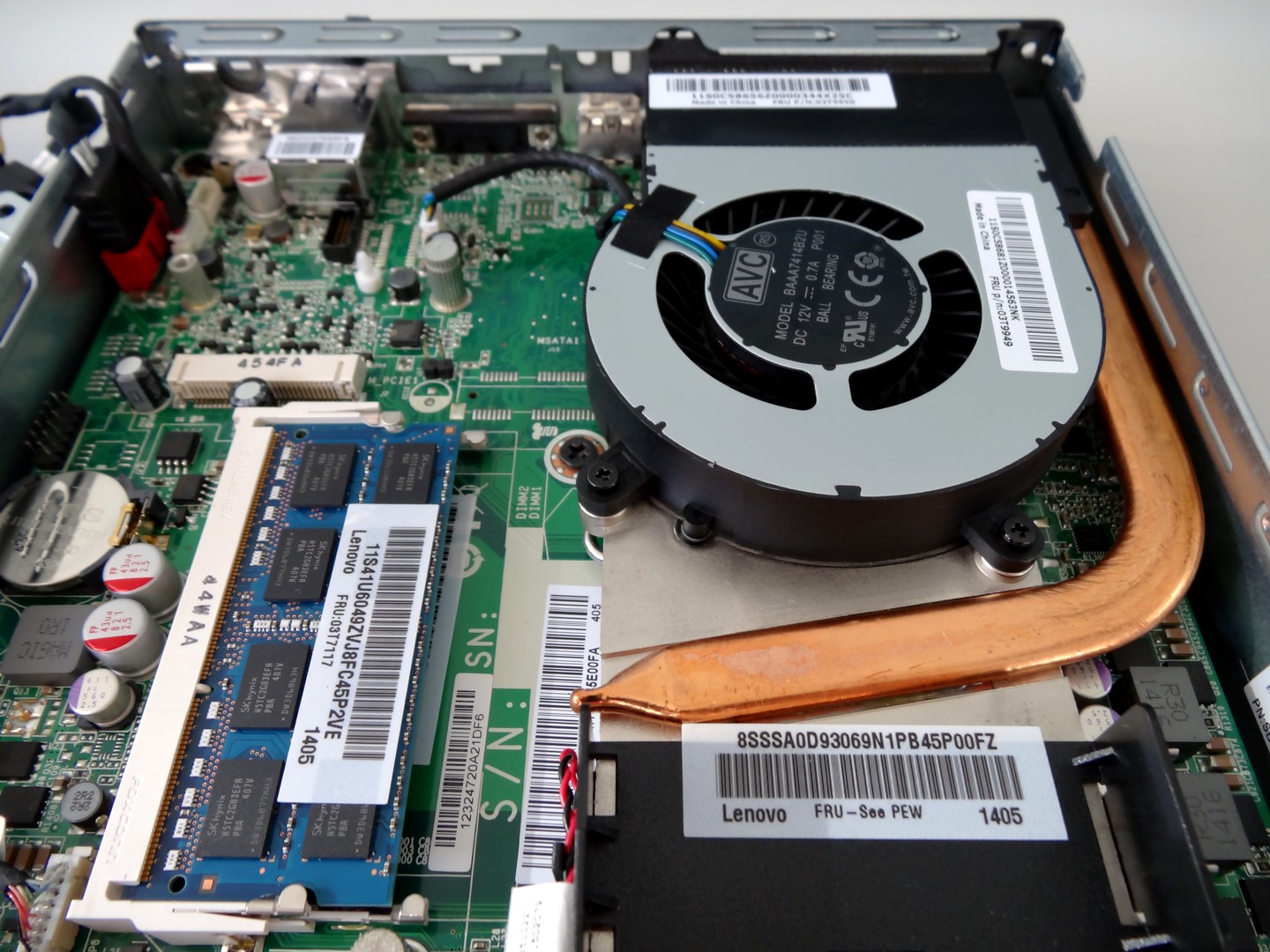
Unité centrale Lenovo M73 ouverte, vue de derrière. Sur la gauche : un ventilateur aspire l’air par le haut qui vient de la grille à l’avant du boîtier, pour refroidir le processeur, puis rejette l’air chaud par les petits trous ronds du boitier noir. Sur la droite : un disque dur 2,5 pouces de 500Go. (Source : collège Jean Macé)
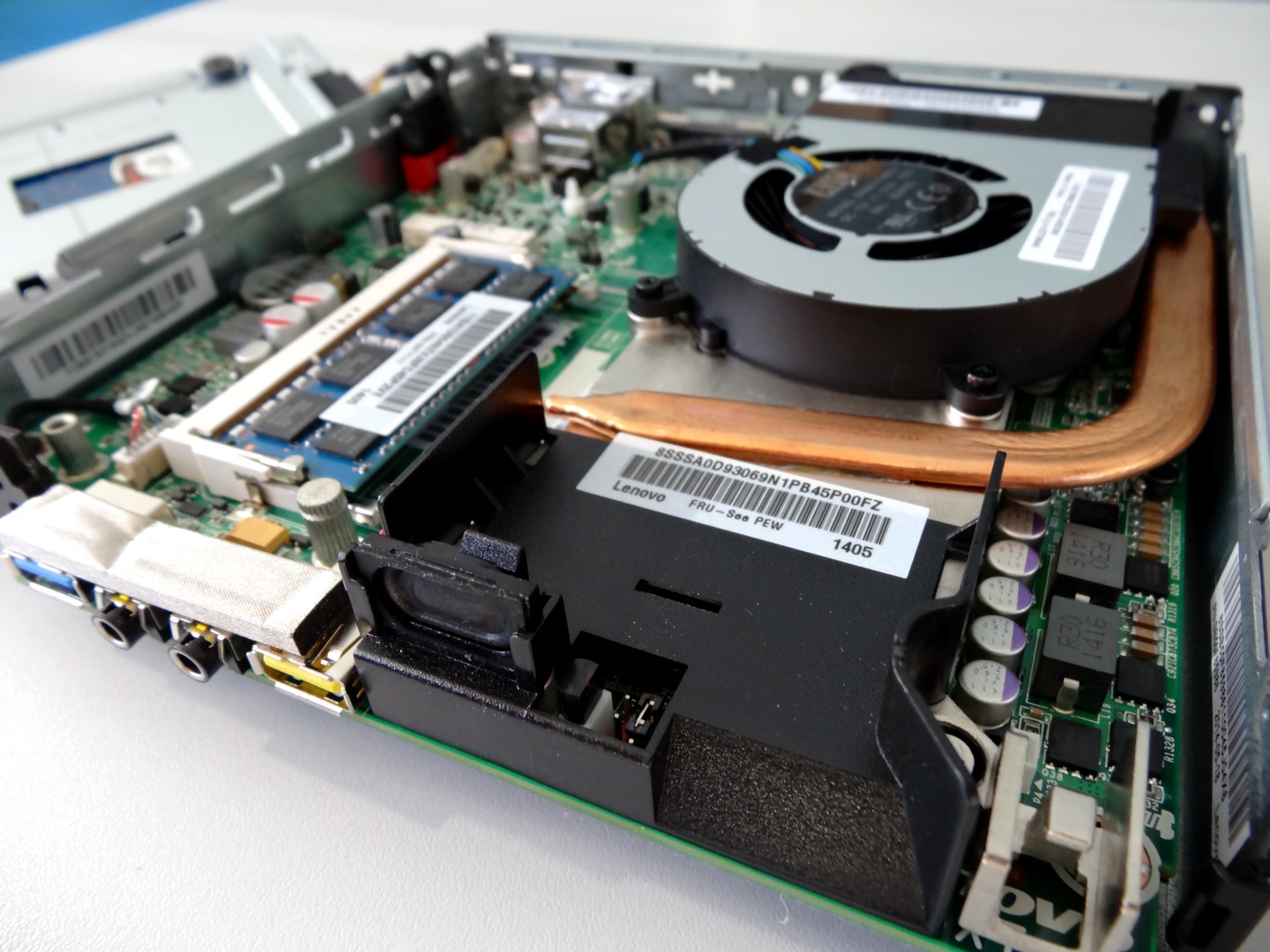
A gauche : Une barrette de mémoire RAM de 2 Go, en bleu. Chaque circuit intégré (rectangles noirs) est une mémoire de 256 Mo. Une deuxième barrette de 2 Go se trouve sous la première. A droite : le processeur est sous la plaque grise en aluminium. Le caloduc en cuivre orangé, conduit la chaleur du processeur pour l’évacuer par les trous à l’arrière du boîtier, à l’aide du flux d’air généré par le ventilateur rond. (Source : Collège Jean Macé)
Le processeur Intel Pentium G3220T est le composant électronique qui traite les informations gérées par l’ordinateur. Celui retourné permet de voir les 1150 points de connexion dorés. Sur les autres photos il est caché par le système de refroidissement. (Source : logicsupply.com : cliquer sur l’image pour suivre le lien).
A gauche : Le disque dur 2,5 pouces de 500 Go. A droite : le système de refroidissement du processeur (qui est sous la plaque grise). (Source : Collège Jean Macé).
Au milieu devant : Un petit haut-parleur rectangulaire noir dépasse. A gauche : les ports USB et audio (Source : Collège Jean Macé)
1. Problématique
– Comment améliorer le confort visuel dans l’habitat tout en limitant l’impact environnemental ?
2. Investigation
– Objectif
. Analyser expérimentalement des solutions techniques existantes permettant d’améliorer le confort visuel dans l’habitat.
. Choisir une lampe parmi plusieurs avec des technologies différentes.
– Lampes proposées
. Lampes électriques pour une alimentation sur le réseau 230 V.
. 3 technologies différentes
1) Ampoule à incandescence (standard ou à halogène)
2) Ampoule à fluorescence (fluocompacte)
3) Ampoule à LEDs (Diodes Électroluminescentes).
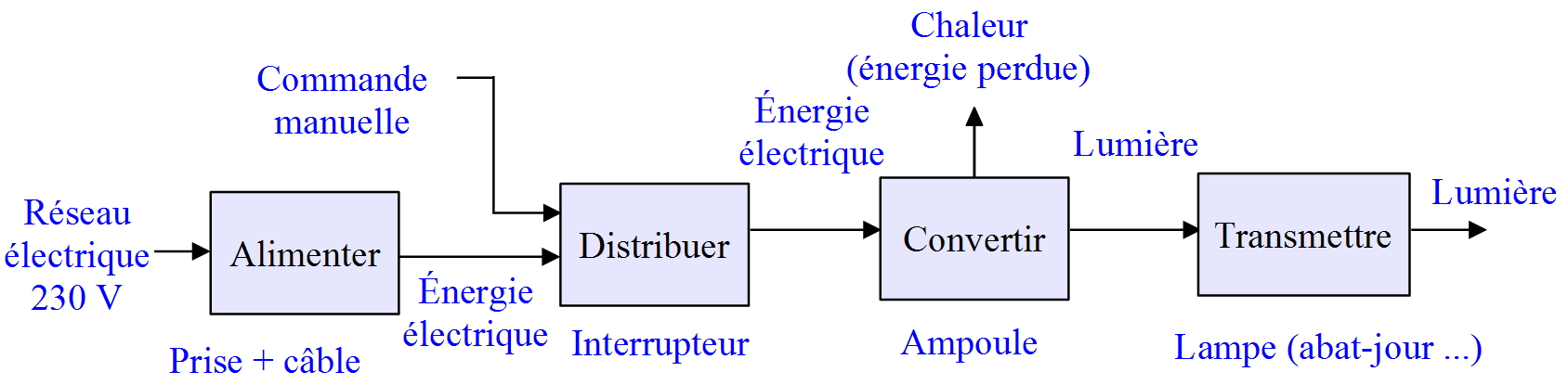
2.1 Schéma fonctionnel de la chaîne d’énergie de l’éclairage électrique proposé
Schéma fonctionnel d’une lampe (Source : Collège Jean Macé)
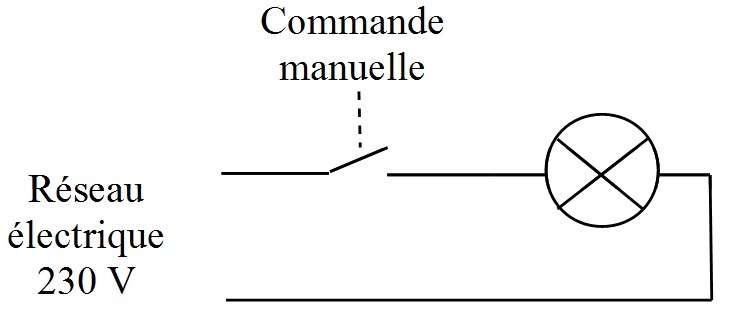
2.2 Schéma du circuit électrique
Schéma électrique d’une lampe (source : collège Jean Macé)
2.3 Critères de choix et mesures choisies
Critères de choix :
. Une lampe doit d’abord bien éclairer.
. Elle doit ensuite peu consommer d’énergie électrique pour des raisons de coût de l’énergie électrique consommée et pour des raisons d’impact environnemental.
Mesures choisies et conditions de mesure :
. Mesure de l’éclairement de la lampe (en lux) avec un luxmètre placé à 30 cm de l’ampoule (perpendiculairement à son axe).
. Mesure de la puissance électrique consommée par la lampe (en watts) avec un wattmètre.
. Mesure de la température de l’ampoule (en degrés Celsius) avec un thermomètre dont la sonde est en contact avec l’ampoule. Cette mesure permettra d’évaluer la chaleur dégagée par l’ampoule.
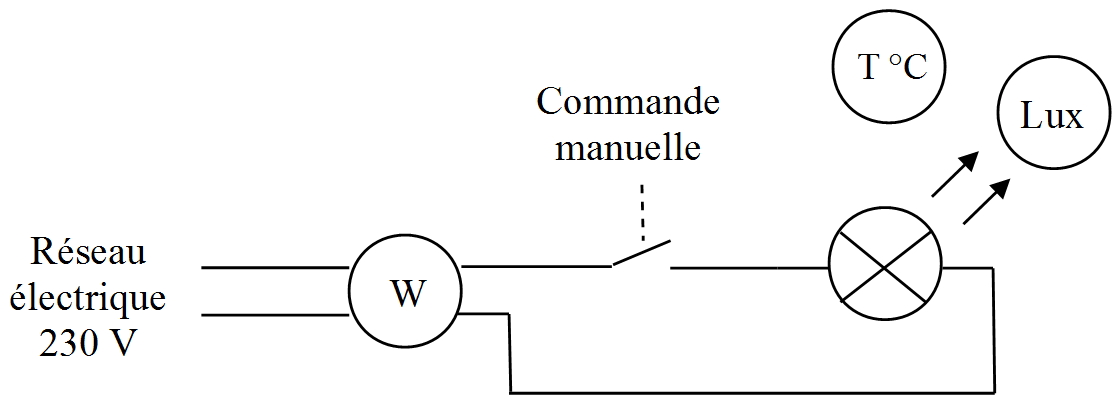
2.4 Schéma électrique avec les appareils de mesures utilisés
Schéma électrique avec les appareils de mesure (source : Collège Jean Macé)
2.5 Tableau comparatif à partir des mesures effectuée, et observations
Type de lampe
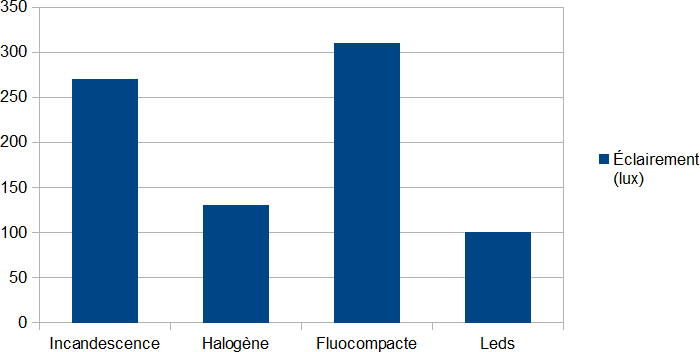
Éclairement (lux)
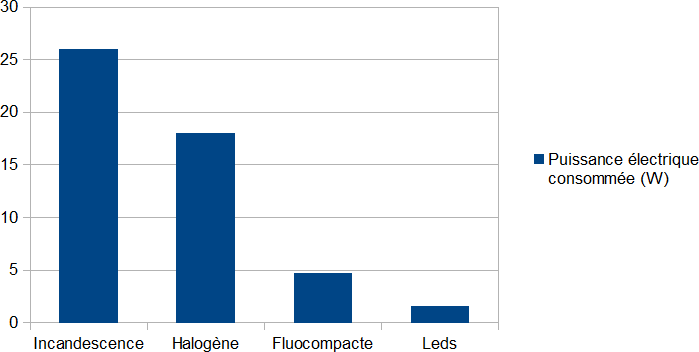
Puissance électrique consommée (W)
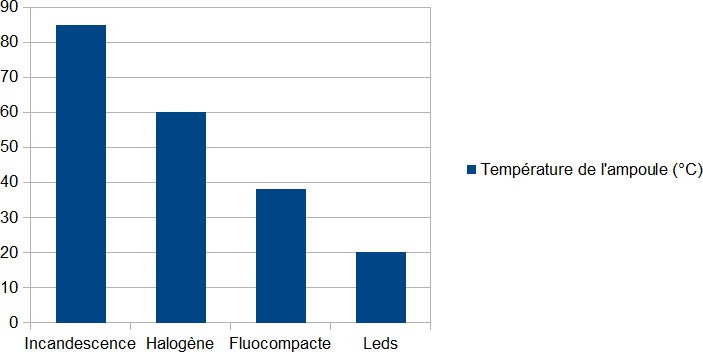
Température de l’ampoule (°C)
À incandescence (standard)
250 à 300
26
> 85
À incandescence, halogène
120 à 150
18
> 60
À fluorescence (fluocompacte)
13 à 370 (à chaud)
4,7
> 38
À Leds
60 à 120 (dépend de la direction)
1,6
20 (température ambiante)
Tableau simplifié pour calculs avec tableur et pour obtenir des graphiques
Type de lampe
Éclairement (lux)
Puissance électrique consommée (W)
Température de l’ampoule (°C)
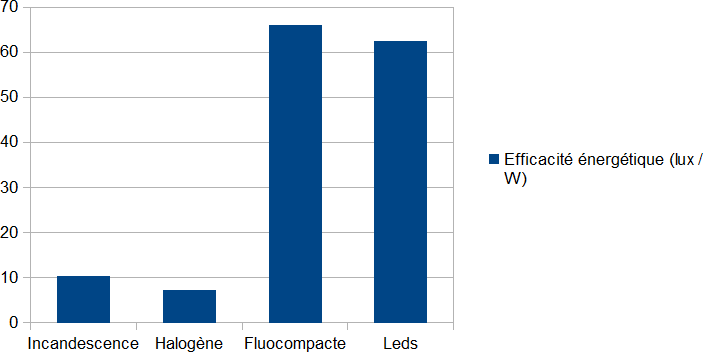
Efficacité énergétique (lux / W)
Incandescence
270
26
85
10,4
Halogène
130
18
60
7,2
Fluocompacte
310
4,7
38
66,0
Leds
100
1,6
20
62,5
Mesures de l’éclairement de chacune de nos 4 lampes (Source : collège Jean Macé)
Mesures de la puissance electrique consommée par chacune de nos 4 lampes (Source : collège Jean Macé)
Mesures de la température de l’ampoule de nos 4 lampes (Source : collège Jean Macé)
Efficacité énergétique en lux / w des lampes testées (source : collège Jean Macé)
Observations
Les lampes à incandescence chauffent beaucoup. La température de l’ampoule monte très haut pendant plus de 10 minutes. Elle a été mesurée après quelques minutes, avant d’avoir atteint sa valeur maximale.
La lampe fluocompacte a un éclairement qui augmente de manière importante pendant les premières minutes, le temps que l’ampoule chauffe : 13 à 30 lux à froid, 150 à 220 lux après qq min, 250 à 370 lux à chaud.
La lampe à Leds éclaire de manière directive. Elle éclaire plus dans son axe. Elle ne chauffe pratiquement pas.
2.6 Avantages, inconvénients, choix d’une lampe
Parmi les lampes proposées, c’est la lampe à incandescence standard et la lampe fluocompacte qui éclairent le plus, à condition d’attendre quelques minutes pour la lampe fluocompacte : environ 300 lux à 30 cm. La lampe fluocompacte a l’avantage de consommer 5 à 6 fois moins que la lampe à incandescence standard : 4,7 W contre 26 W.
La lampe à Leds consomme encore nettement moins : 1,6 W contre 4,7 W mais elle éclaire moins.
L’efficacité énergétique en lux / W semble être très proche dans notre cas entre la lampe fluocompacte et la lampe à Leds. Ce sont les lampes les plus économes en énergie.
Une lampe à Leds plus puissante que celle testée serait intéressante.
Après une recherche sur Internet on constate que les lampes à Leds sont nettement plus chères qu’une lampe fluocompacte de même puissance lumineuse, notamment si on recherche une lampe puissante et peu directive. Mais la durée de vie d’une lampe à Leds étant nettement plus longue, on peut espérer amortir cet investissement en faisant des économies d’électricité (à vérifier par le calcul dans un cas concret).
Parmi les quatre lampes testées, la lampe fluocompacte éclaire bien, de manière peu directive, en chauffant peu, donc avec une bonne efficacité énergétique. Elle a l’avantage d’être moins chère à l’achat qu’une lampe à Leds. Elle a l’inconvénient de n’éclairer correctement qu’après quelques minutes. Il existe des modèles de lampes fluocompacte qui nécessitent moins de temps pour obtenir un éclairement proche de son éclairement maximum.
1) Aller sur le blog avec un navigateur (accessible avec Google en tapant “techno 4e jean macé” par exemple).
2) Cliquer sur Connexion (bandeau de gauche) pour accéder à votre interface en tant qu’auteur.
3) Cliquer sur Articles puis Ajouter (bandeau de gauche).
4) Saisir un titre (avec des mots qui décrivent le contenu de votre article).
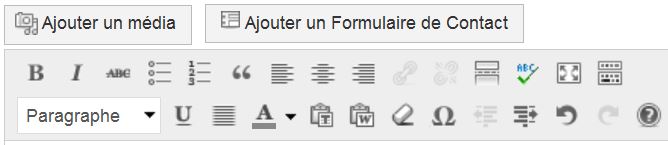
5) Rédiger l’article en utilisant la barre d’outils qui ressemble à celle d’un traitement de textes (voir ci-dessous) :
. “Format” pour choisir un style de texte adapté à des titres.
. “B” pour mettre en gras (Bold en anglais)
. “U” pour souligner (Underline en anglais)
6) Cocher la catégorie qui correspond aux rubriques du blog (à droite).
7) Cliquer sur “Enregistrer brouillon” (en haut à droite). Seul l’auteur et les administrateurs peuvent voir et modifier ce brouillon. Un lien au-dessus de l’article permet de le prévisualiser, comme il sera après publication.
8) Quand l’article est prêt pour être publié, cliquer sur “Publier” (à droite). L’article est alors visible de tous sur le blog.
Barre d’outils WordPress (Source : Capture WordPress par Collège Jean Macé)
. En cliquant sur le symbole ci-dessous on affiche une 2ème barre d’outils. Pour insérer un lien vers une page sur internet
1) Taper le texte du lien (qui sera visible sur l’article)
2) Sélectionner le texte du lien
3) Cliquer sur le symbole du lien (voir ci-dessous)
4) Entrer l’adresse internet du lien (URL de type http:// …). Il suffit pour cela de coller l’adresse que vous aurez copiée par ailleurs sur votre navigateur.
5) Cliquer sur “Ajouter un lien”.
Pour Insérer une image
Cas 1 : insérer une image à vous depuis votre ordinateur
1) Cliquer sur “Ajouter un média” (juste au-dessus de la barre d’outils).
2) Cliquer sur “Envoyer des fichiers” (vers le serveur qui héberge le blog).
3) Cliquer sur “Sélectionner des fichiers” puis sélectionner votre fichier sur votre ordinateur. Attention : Le nom du fichier ne doit pas comporter d’accent, ni d’apostrophe, de parenthèses, ou autres caractères spéciaux.
4) Attendre le téléchargement vers le serveur qui héberge le blog (Rectorat de Poitiers).
5) Ajouter une légende (dans le bandeau de droite) qui donne en une phrase ce qu’on doit voir sur l’image (Par exemple : « Croquis de notre maquette ») et qui précise la source de l’image (par exemple : « Source : Collège Jean-Macé 4ème 2 équipe 1″).
D’autres paramètres de l’image peuvent être changés (alignement, taille, …).
6) Cliquer sur “Insérer dans l’article”.
7) Pour modifier à nouveau les paramètres de l’image : cliquer sur une image dans un article, puis cliquer sur la première icône qui apparaît.
Cas 2 : insérer une image trouvée sur une page Internet ou stockée en ligne (sur Google Photos par exemple)
1) Aller sur la page internet qui contient l’image, ou sur Google Photos (par exemple).
2) Enregistrer l’adresse de l’image (pas celle de la page internet) :
. Faire un clic droit sur l’image, puis sur “Informations sur l’image” (pour Mozilla Firefox) ou “Propriétés” (pour Internet Explorer),
. Sélectionner et copier l’adresse de l’image (voir “emplacement” dans Mozilla Firefox).
3) Dans votre article cliquer sur “Ajouter un média” (juste au-dessus de la barre d’outils).
4) Cliquer sur “Insérer à partir d’une adresse Web”.
5) Coller l’adresse de l’image.
6) Ajouter une légende (dans le bandeau de droite) qui donne en une phrase ce qu’on doit voir sur l’image (Par exemple : « Croquis de notre maquette ») et qui précise la source de l’image (par exemple : « Source : Collège Jean-Macé 4ème 2 équipe 1″).
D’autres paramètres de l’image peuvent être changés (alignement, taille, …)
7) Cliquer sur “Insérer dans l’article”
8) Pour modifier à nouveau les paramètres de l’image : cliquer sur une image dans un article, puis cliquer sur la première icône qui apparaît.
Nous allons réaliser une maquette de arroseur automatique nous permettant d’analyse de manière expérimentale certaines des solutions techniques utilisées dans cet objet technique.
Objet technique réel retenu par l’équipe
Nous avons choisi comme support un arroseur automatique .
Programmateur l’heure de l’arrosage ,tuyaux.
Principe de fonctionnement
Initialement le système est à l’arrêt .
Lorsque l’utilisateur appuie sur le bouton marche
Lorsque le capteur dechaleur détecte une ausse de température alors sa arrose.
Maquette à réaliser
Notre équipe a choisi de réaliser une maquette nous permettant d’analyser les fonctions techniques suivantes :
Un arrosage automatique.
Moins d eau a gaspiller.
Matériel nécessaire pour réaliser notre maquette
Un capteur permettant d’acquérir l’information …
Une carte électronique programmable permettant de gérer le fonctionnement de manière automatique.
OBJECTIF : Le store motorisé permet de faire monter et descendre le store à l’aide d’une télécommande sans fil.
PRINCIPE DE FONCTIONNEMENT :
L’utilisateur appuie sur la télécommande sans fil. Lorsque le capteur détecte les ondes de la télécommande, les stores montent ou descendent.
MATÉRIAUX UTILISÉS : Il faut des stores, une télécommande sans fil, une carte électronique programmable permettant de gérer le fonctionnement de manière automatique.
CARACTÉRISTIQUES DE NOTRE MAQUETTE :
Le store motorisé mesure 95 cm.
Le motorisé descend en 17 secondes.
Donc la vitesse du store motorisé est de 0,05 m seconde.
MAQUETTE A REALISER :
Notre équipe a choisi de réaliser une maquette nous permettant d’analyser les fonctions techniques suivantes :
Transmettre une télécommande sans fil à un capteur qui est dans le store motorisé.
Réaliser une maquette nous permettant d’analyse de manière expérimentale certaines des solutions techniques utilisées dans un objet technique.
Objet technique réel retenu par l’équipe
Nous avons choisi comme support …
Insérer une image (avec légende et source).
Cet objet sert à …
Principe de fonctionnement
Initialement le système est à l’arrêt …
Lorsque l’utilisateur appuie sur …
Lorsque le capteur de … détecte … alors …
Maquette à réaliser
Notre équipe a choisi de réaliser une maquette nous permettant d’analyser les fonctions techniques suivantes :
Transmettre une commande sans fil.
Générer le mouvement de …
Gérer le fonction du système à partir d’un programme.
Matériel nécessaire pour réaliser notre maquette
Un capteur permettant d’acquérir l’information …
Une carte électronique programmable permettant de gérer le fonctionnement de manière automatique.
Un moteur permettant de …
Matériaux :
Plaque de plastique de 3 mm pour réaliser …
Cette année, notre budget nous a permis d’acheter une tablette pour la Technologie au collège Jean Macé. Notre objectif est de l’utiliser d’abord pour des applications en domotique pour les 4ème. J’espère que nous pourrons faire modifier de telles applications avec le logiciel App Inventor (dont la syntaxe par blocs ressemble à Ardublock). Nous comptons aussi utiliser cette tablette comme appareil photo connecté à Internet pour que les élèves (de la 6ème à la 3ème) puissent facilement photographier leurs expérimentations, puis intégrer leurs photos dans leurs articles sur nos blogs, sous WordPress, à partir d’un PC.
Tablette Acer A3 A10 achetée pour la Technologie (Source : acer.com)
On a reçu la tablette la semaine dernière et j’ai commencé à la configurer. Grâce à Androïd 4.2 j’ai fait un compte par niveau (6ème à 3ème) sur la tablette. J’ai choisi d’utiliser les outils Google, notamment Google Drive, Google+, et Google Photos.
J’ai paramétré les comptes Google (un par niveau) pour que les photos prises avec la tablette soient automatiquement sauvegardées sur Google+ et donc visibles dans Google Photos. J’ai aussi paramétré Google+ pour que les photos de Google Drive soient affichées automatiquement.
1) Aller sur le blog (mots clés : techno 4ème Jean Macé).
2) Cliquer sur Connexion (bandeau de gauche) pour accéder à votre interface en tant qu’auteur.
3) Cliquer sur Articles puis Ajouter
4) Saisir un titre (avec des mots qui décrivent le contenu de votre article).
5) Rédiger l’article en utilisant la barre d’outils qui ressemble à celle d’un traitement de textes :
. “Format” pour choisir un style de texte adapté à des titres.
. “B” pour mettre en gras (Bold en anglais)
. “U” pour souligner (Underline en anglais)
. Le symbole du lien pour insérer un lien
etc.
Barre d’outils WordPress (Source : Capture WordPress par Collège Jean Macé)
Cas 1 : insérer une image à vous depuis votre ordinateur
1) Cliquer sur “Ajouter un média” (juste au-dessus de la barre d’outils).
2) Cliquer sur “Envoyer des fichiers” (vers le serveur qui héberge le blog).
3) Cliquer sur “Sélectionner des fichiers” puis sélectionner votre fichier sur votre ordinateur.
4) Attendre le téléchargement vers le serveur qui héberge le blog.
5) Ajouter une légende (dans le bandeau de droite) qui donne en une phrase ce qu’on doit voir sur l’image (Par exemple : “Croquis de notre maquette”) et qui précise la source de l’image (par exemple : “Source : Collège Jean-Macé 4ème 2 équipe 1”).
D’autres paramètres de l’image peuvent être changés (alignement, taille, …)
6) Cliquer sur “Insérer dans l’article”
7) Pour modifier à nouveau les paramètres de l’image : cliquer sur une image dans un article, puis en cliquer sur la première icône qui apparaît.
Cas 2 : insérer une image trouvée sur une page Internet ou sur Google Photos
1) Aller sur la page internet qui contient l’image, ou sur Google Photos.
2) Enregistrer l’adresse de l’image (pas celle de la page internet) :
. Faire un clic droit sur l’image, puis sur “Informations sur l’image” (pour Mozilla Firefox) ou “Propriétés” (pour Internet Explorer),
. Sélectionner et copier l’adresse de l’image (voir emplacement dans Mozilla Firefox).
3) Dans votre article cliquer sur “Ajouter un média” (juste au-dessus de la barre d’outils).
4) Cliquer sur “Insérer à partir d’une adresse Web”.
5) Coller l’adresse de l’image.
6) Ajouter une légende (dans le bandeau de droite) qui donne en une phrase ce qu’on doit voir sur l’image (Par exemple : “Croquis de notre maquette”) et qui précise la source de l’image (par exemple : “Source : Collège Jean-Macé 4ème 2 équipe 1”).
D’autres paramètres de l’image peuvent être changés (alignement, taille, …)
7) Cliquer sur “Insérer dans l’article”
8) Pour modifier à nouveau les paramètres de l’image : cliquer sur une image dans un article, puis en cliquer sur la première icône qui apparaît.
Pour convertir un fichier pdf en une image
1) Ouvrir le fichier pdf (un croquis numérisé par exemple).
2) Choisir l’outil permettant de prendre une image d’une partie du document (“snapshot” avec le symbole d’un appareil photo).
3) Sélectionner avec cet outil la partie du document que vous voulez convertir en image. Zoomer auparavant pour obtenir une image de qualité (avec une bonne résolution).
4) Ouvrir un logiciel de traitement d’image comme PhotoFiltre (aller dans : logiciels pédagogiques / Commun / Photo Filtre).
5) Cliquer sur Edition / coller en tant qu’image.
6) Enregistrer dans le dossier de travail de votre équipe (par exemple).
7) Insérer cette image avec la première méthode décrite ci-dessus (cas 1).
Attention le logiciel Ardublock est en fin de vie. Depuis maintenant deux ans environ, de nouveaux logiciels de programmation ont été développés, la plupart à partir de Blockly conçu spécialement par Google pour faciliter justement le développement de ce type de logiciels pédagogiques. On trouve aujourd’hui des logiciels capables de remplacer avantageusement Ardublock. J’ai choisi d’utiliser Blockly Arduino qui a entre autre l’avantage de pouvoir facilement s’adapter à mes besoins pédagogiques. J’ai rédigé un article qui vous expliquera plus précisément les avantages de Blockly Arduino par rapport à Ardublock, ainsi que les points à améliorer prochainement.
La suite de cet article date de novembre 2013. Il est destiné aux élèves curieux qui s’intéressent à l’informatique ou à l’électronique.
1. Arduino : c’est quoi ?
Arduino est le nom d’une gamme de cartes à microcontrôleur, c’est à dire de cartes électroniques programmables. Elles utilisent toutes un même logiciel de programmation appelé logiciel Arduino également.
Carte Arduino Leonardo (Source : arduino.cc)
2. Arduino : ça sert à quoi ?
Une carte Arduino, comme toutes les cartes à microcontrôleur, permet de piloter un système de manière interactive à partir du programme que l’on aura défini et mis dans sa mémoire. Par exemple gérer automatiquement l’ouverture d’une porte de garage, envoyer un SMS quand le jardin est trop sec et gérer le système d’arrosage à distance, piloter un nouveau robot, … Il faut pour cela associer à la carte Arduino des capteurs (de lumière, de température, de position, …), des actionneurs (moteurs, pompe, …), des organes de sortie (lampe, chauffage, …), des circuits de puissance, une alimentation (piles, panneaux solaires, …), des interfaces de dialogue (boutons, LEDs, écran, …), des interfaces de communication (réseau filaire, réseau sans fil, …), …
Une carte Arduino (de base) gère essentiellement le traitement de l’information (source : developpez.com)
Arduino peut être utilisé pour des applications en domotique (source : jeromeabel.net)
Un robot intégrant une carte Arduino Leonardo (source : mhobbies.com)
3. Arduino : ça sert à qui ?
Arduino a été conçu pour l’enseignement de l’électronique et de l’informatique. Il a été conçu pour être accessible à tous les « bricoleurs » : système pas cher, simple, … mais performant !
Des étudiants de l’école Louis Lumière travaillent sur un projet avec des effets sonores pilotés par une carte Arduino (source : digitalarti.com)
4. Arduino : pourquoi un tel succès ?
Deux raisons principalement au succès du système Arduino : Le logiciel Arduino est gratuit et il existe de nombreuse autres cartes électroniques compatibles pour faire simplement des maquettes.
Carte électronique connectée sur une carte Arduino pour contrôler des moteurs (source : robotshop.com)
Carte connectée sur une carte Arduino pour lire des fichiers de musique (source : seeedstudio.com)
5. Arduino : ça coûte combien
Pour tester Arduino :
Carte Arduino Leonardo = 18 € Câble USB A / micro USB B (1,8 m) = 4 €
Logiciel Arduino : gratuit
Total = 22 € TTC (hors frais de port)
Cartes à connecter sur la carte Arduino : prix très variables, mais entre 10 et 30 € généralement.
6. Arduino : ça vient d’où ?
Monsieur Massimo Banzi enseignait la conception interactive en Italie. En 2005, il a conçu une carte électronique minimaliste et low cost pour permettre à ses étudiants de bricoler dans des activités de projets. Il appellera cette carte Arduino comme le bar où il avait l’habitude d’aller. Ce nom correspond à celui du roi Arduin (en 1002 en Italie). Avec l’aide d’une équipe de développeurs, ils conçoivent un logiciel spécifique. Le succès grandissant rapidement au fil des années, différentes versions matérielles et logicielles seront développées avec aujourd’hui l’Arduino Leonardo.
L’équipe de développeurs des produits Arduino officiels, avec Massimo Banzi en bas à droite (source : atelier-objets-communicants.ensad.fr)
7. Arduino : c’est utile au collège ?
Arduino a été développé au départ pour des étudiants où des bricoleurs qui ne maîtrisent pas l’électronique où l’informatique. Au collège, en Technologie, l’utilisation d’une carte à microcontrôleur est intéressante si on la programme graphiquement avec un logiciel comme Ardublock.
Les systèmes automatiques contrôlés par programme sont étudiés surtout à partir de la classe de quatrième, avec le thème « confort et domotique », mais ils peuvent être utilisées aussi comme aide au pilotage de dispositifs expérimentaux pour l’acquisition et le traitement de données issues de mesures par exemple. Les cartes Arduino peuvent être facilement mises en oeuvre par les élèves et être un atout très précieux pour rendre des projets motivants, innovants, performants.
En classe de quatrième, le niveau d’exigence reste assez faible. L’élève doit faire des investigations sur des systèmes qui utilisent des solutions techniques programmées. Il doit savoir identifier, choisir et mettre en œuvre des solutions techniques, mais la compréhension doit rester globale. Il doit surtout être capable d’en parler, sans maîtriser les détails des solutions techniques et de leur mise en œuvre.
En ce qui concerne plus spécifiquement la programmation, les textes officiels précisent que : « la programmation d’un support automatique ne demande pas l’écriture de lignes de code. Elle doit être graphique si le support présente une interface qui le permet. Le système automatique doit être simple. L’objectif est de comprendre de manière globale l’impact de la modification sur le fonctionnement du système. »
8. Arduino + Ardublock : la solution idéale pour débuter ?
Ardublock permet de programmer graphiquement, à l’aide de blocs, une carte à microcontrôleur de type Arduino. Il suffit de sélectionner dans une bibliothèque des blocs de programme, … comme avec le logiciel Scratch qui permet d’apprendre l’informatique dès 8ans. C’est une application, libre et gratuite comme le logiciel Arduino dans lequel elle s’intègre (comme le patch d’un jeu vidéo). La programmation d’une carte Arduino avec Ardublock est accessible aux débutants en informatique, à partir de 10 ans environ.
Interface d’Ardublock : à gauche les bibliothèques de blocs, à droite le programme avec les blocs sélectionnés et édités (source : LP2I)
8. Arduino : quel avenir ?
Fin 2013 va sortir l’Arduino Yún qui permet un accès performant à Internet en Wifi. Cette carte contient deux processeurs. La carte est de taille réduite. Elle devrait coûter 60 à 70 € seulement. l’Arduino Yún pourra communiquer facilement avec une tablette tactile Androïd ou un smartphone qui servir d’interface de dialogue intelligente. Les deux communiqueront sur le même réseau, en Wifi par exemple, et partageront des ressources communes sur le cloud (espace de stockage sur Internet). D’ailleurs Yún signifie cloud en chinois !
Carte Arduino Yun avec interface Wifi (source : arduino.CC)
Salle de Technologie au collège Jean Macé de Châtellerault (Source : Collège Jean-Macé)
Les principaux objectifs de ce blog
– Apprendre aux élèves à communiquer en utilisant le vocabulaire et les notions vues en classe.
– Garder une trace de ce qui a été étudié pour voir les progrès réalisés, aussi bien dans la maîtrise des contenus que dans l’aptitude à les présenter.
– Montrer aux parents, et aux internautes en général, ce qui se fait en Technologie au collège Jean-Macé.
– Echanger avec d’autres professeurs pour mutualiser nos expériences. Internet est une source formidable d’informations. Avec ce blog nous espérons apporter notre contribution à cette richesse en montrant comment la Technologie et son enseignement évoluent en permanence.
Des blogs spécifiques à chaque niveau, de la 6ème à la 3ème, ont été créés par ailleurs pour montrer les activités proposées et permettre aux élèves de rédiger des articles qui rendent compte de leur travail.
N’hésitez pas à contacter les enseignants de Technologie du collège Jean Macé, Philippe Teruel et Daniel Pers, en laissant des commentaires sur ce blog.
Merci à Stéphane Penaud qui travaille au Rectorat de Poitiers au service de la MATICE (Mission Académique aux Technologies de l’information et de la communication pour l’enseignement). C’est la MATICE qui met à notre disposition ce blog pédagogique (hébergé par le Rectorat de Poitiers) sur la plateforme Blogpeda.ac-poitiers.fr. Ces blogs sous-WordPress sont simples d’utilisation pour les élèves qui seront les principaux auteurs de ce blog.


 2) Acquisition de la présence d’un obstacle devant le robot
2) Acquisition de la présence d’un obstacle devant le robot







 Dimensions (avec bobine) et poids : 440 x 450 x 460 mm, 10 kg
Dimensions (avec bobine) et poids : 440 x 450 x 460 mm, 10 kg