Vendredi 19, dans la cour du collège, un ballon de type météo, avec expériences embarquées, sera lâché vers 13h par les élèves de la classe de 3°8.
Les élèves ont préparé leur projet en suivant le cahier des charges du CNES/Planète Sciences.
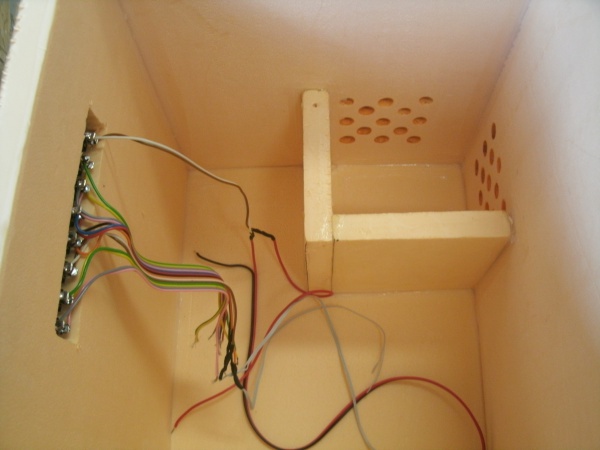
L’intérieur de la nacelle.
Descriptif des expériences embarquées :
Les télémesures :
2 capteurs de température
2 capteurs de luminosité
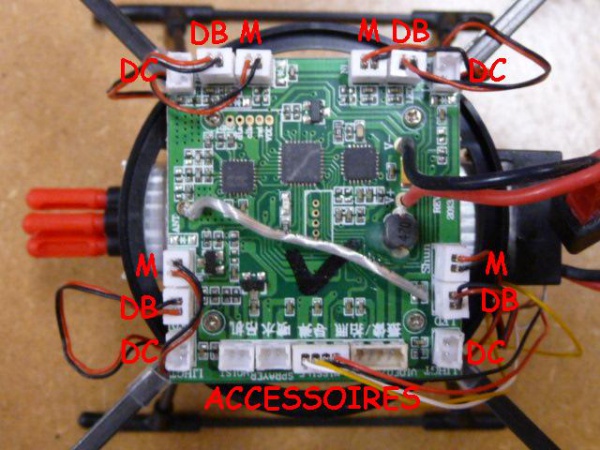
1 capteur de pression atmosphérique mecanique
1 capteur de pression atmosphérique électronique
1 capteur d’hygrométrie
Appareils photos et caméras :
Rotondité : 1 APN – 1 Caméra
Topologie : 1 APN – 1 Caméra
1 Caméra pour l’éclatement
AEROTECHNICIEN : JULIE ROMARY
EQUIPE DE SUIVI ET DE RECUPERATION : RADIOAMATEURS DE LA VIENNE
Ci-dessous les élèves viennent de sortir de la classe avec la chaîne de vol, de haut en bas, le ballon, le parachute, le réflecteur radar et la nacelle.

La bâche de protection est dépliée, le détendeur est fixé sur la bouteille d’hélium

Mise en place de la bâche de maintien du ballon

Le ballon est prêt à être lâché

Première vue de la nacelle

Vue du sol


Le quartier de la Gendarmerie et le rond point de Montmorillon

En bas à droite, l’Entreprise Boutillet

En bas à gauche, le Pont de Lussac

Et à droite, Lussac-les-Chateaux

Au centre, La Grande Ferrière et le rond point

En bas à gauche, Saint Bonnet de Bellac

Aéroport de Limoges-Bellegarde, la piste

En haut à droite, Limoges et au dessous la piste de l’Aéroport
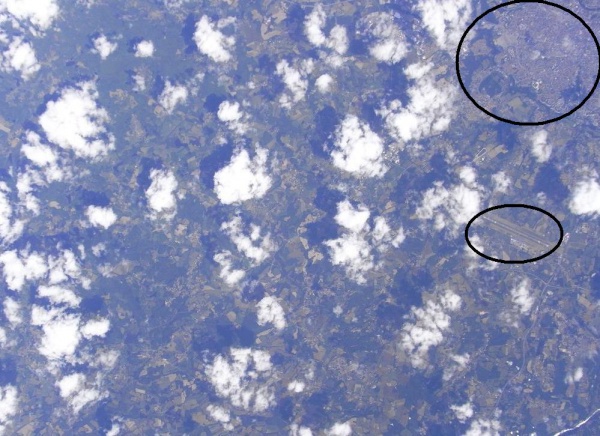
En bas, au centre, Limoges
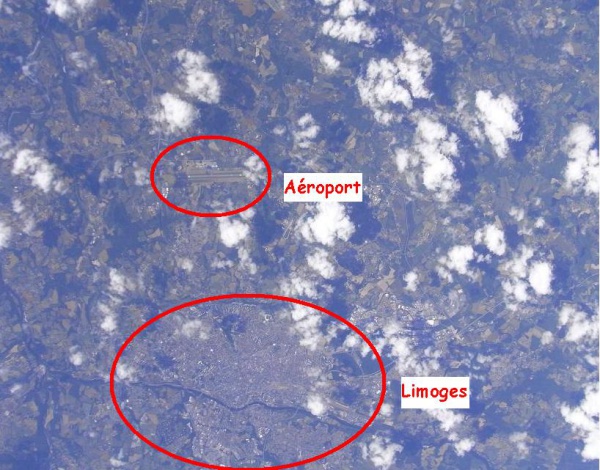
En haut à gauche, Aixe sur Vienne
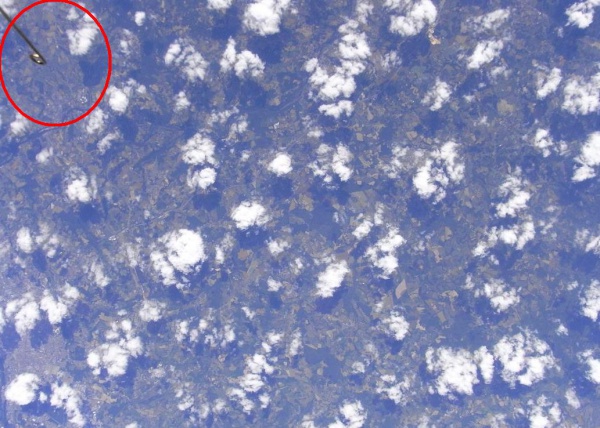
Comparatif de deux documents, la photo ci-dessus, sur laquelle on peu voir la piste de l’Aéroport de Limoges Bellegarde et ci-dessous, une capture d’écran de Google Earth.
En mesurant la piste sur les images, nous avons ainsi une estimation de l’altitude au moment de la prise de vue, soit environ 35 km.
Cependant, la carte étant pleine nous ne sommes pas en mesure de dire si la nacelle à poursuivi son ascension. Nous pouvons simplement indiquer qu’elle a au moins atteint cette altitude.
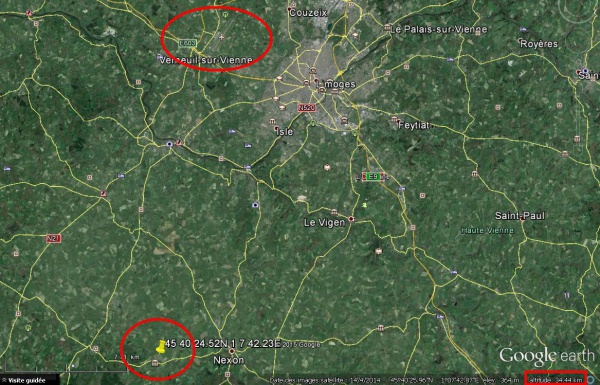
Point de chute, à 105 kilomètres de Chauvigny, à environ 158° et pour coordonnées GPS 45°40’24.52″N – 1°7’42.23″E
C’est grâce à la gentillesse de Monsieur Jean-François COUTY co-gérant de la Ferme Eolienne des des Monts de Rilhac-Lastours SAS que nous avons pu récupérer notre nacelle.
Il nous a contacté le 19 juin vers 20h15, la nacelle étant tombé sur une de ses parcelles.
Non loin du point de chute se trouve un aérogénérateur placé sur les hauteurs de Rilhac-Lastours. Cette éolienne de 120 mètres est la concrétisation d’un projet éco-citoyen porté par des particuliers depuis 2003. Opérationnelle, d’une puissance de 2MW, elle a la capacité de couvrir les besoins en électricité d’environ 5.000 habitants.

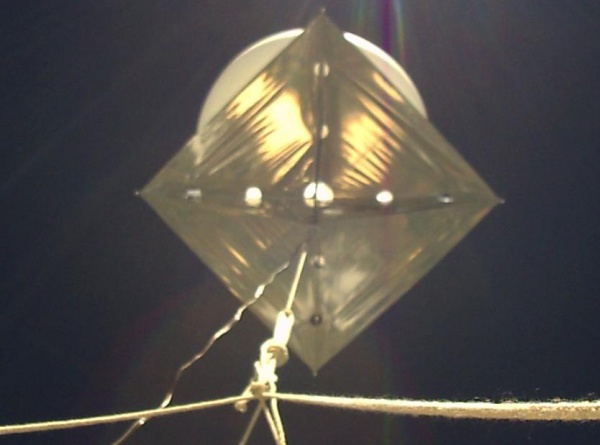
Le ballon filmé par une caméra fixée sur la nacelle. Malheureusement, la caméra n’a pas pu filmer l’éclatement car la carte mémoire était pleine avant l’évènement.
Les prévisions de chute
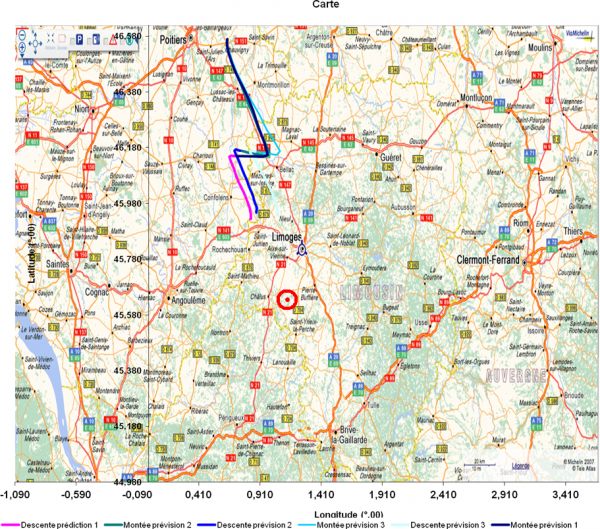
Les trois prévisions de vol, la veille, exactement dans la bonne direction ! Lors de la descente le ballon à poursuivi sa route dans l’axe des prévisions, soit en direction d’Aixe sur Vienne.
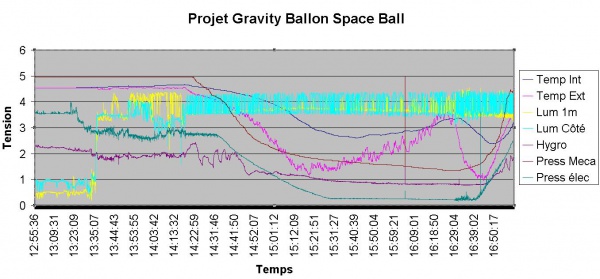
Courbes obtenues par télémétrie, tout au long du vol…
Cette année, et pour la première fois depuis 10 ans, nous avons eu toutes les données par radio, jusqu’au point de chute.
La Presse en parle


Bilan
Le bilan est positif, quand même !
La classe était divisée en deux groupes. Un groupe avec pour projet le ballon avec nacelle et expériences embarquées. Un groupe avec pour projet un Rover de type martien.
Le projet s’est bien déroulé tout au long de l’année, la classe a bien adhéré aux différents travaux. Les élèves étaient très heureux et fier d’être les acteurs de ce projet.
La lâcher de ballon a eu lieu le 19 juin, lors de la journée des portes ouvertes. Prévu à 13h/13h15, suite à une défaillance des deux détendeurs le lâcher ne s’est effectué qu’à 14h24.
La démonstration du Rover n’a pas eu lieu, le projet était peut-être trop ambitieux. De plus le matériel, Arduino, mis à disposition des élèves s’est avéré assez long à prendre en main, dans la mesure où il fallait que je m’auto forme en même temps. La partie mécanique a démarré un peu trop tard dans l’année.
Tous les travaux et le suivi du ballon en temps réel étaient visibles lors de cette journée en salle de technologie 002.
Les travaux du groupe ballon :
– réalisation du cahier des charges et écriture
– réalisation de capteurs et étalonnage
– construction de la nacelle
– réalisation d’un blog
– utilisation d’Arduino (doublage des capteurs avec enregistrement des données)
Les travaux du groupe Rover :
– réalisation du cahier des charges et écriture
– construction du Rover (lego)
– réalisation d’un blog
– utilisation d’Arduino (cerveau du Rover)
Pour les deux groupes, les travaux d’équipe sont les suivants :
– veille technologique, TICE, organisation de la journée du 19 juin,
– communication, blog, T-shirt avec logo et slogan,
– conception, fabrication, mise au point,
– apprentissage de la programmation Arduino avec Ardublock ou en programme type C.
– charte graphique, logo, slogan, style, design, animation de la journée par la création d’un thème musical, mise en scène, utilisation de l’imprimante 3D pour la réalisation d’une mascotte de projet.
Les Radioamateurs de la vienne sont intervenus sur une séance de deux heures :
– première heure : ils ont présenté leurs activités, l’histoire, les différents matériels, ils ont fait faire aux élèves un exercice de triangulation sur carte.
– deuxième heure : ils ont mis en œuvre un émetteur/récepteur et ont communiqué par radio en morse et en vocal, ils ont fait faire aux élèves un exercice de recherche de balise radio cachée dans la cours du collège. C’était une simulation de la récupération de la nacelle.
Quelques remarques en général et sur les dysfonctionnements en particulier,
afin d’en tenir compte pour l’année prochaine
– Le cahier des charges, a très bien été maîtrisé par les élèves. La nacelle a été validée.
– Tous les capteurs ont délivré les informations souhaitées. Nous en avons installé 7 sur 8 possibles, notre capteur d’UV était défectueux, nous ne l’avons pas installé, nous avions une autre expérience sur le son en remplacement, mais là également, au dernier moment, les données n’étaient pas fiables. Le CNRS nous fournira un capteur d’UV fiable pour l’année prochaine.
– Cette année, l’antenne de réception a été fixée en haut de l’escalier de secours du bâtiment D, sans en gêner l’accès ni l’utilisation.
De ce fait, pour la première fois depuis 10 ans, nous avons reçu toutes les données du vol.
– Deux élèves ont souhaité suivre la trajectoire de vol en compagnie d’un radioamateur, ils sont rentrés au collège vers 20h sans la nacelle, elle était alors perdue. Vers 20h10, un agriculteur me contactait pour m’informer qu’il avait retrouvé la nacelle dans son champ de céréales situé à 15 km au sud ouest de Limoges, à 110 km/2h de route de Chauvigny. Je suis allé la chercher le soir même.
– Le nouveau système lumineux de cette année, même s’il n’a pas été utile pour la récupération, a été bien plus performant et fonctionnait encore après le vol.
– Afin d’être plus disponible pour répondre aux questions des parents et mieux les accueillir et dans le même temps, être également plus disponible pour le suivi, le lâcher ne se fera pas le jour des portes ouvertes, mais plutôt dans la deuxième quinzaine du mois de mai. De plus, cela me laisse du temps pour faire un bilan avec les élèves.
– L’appareil photo des prises de vues horizontales n’a pas fonctionné, la carte mémoire étant endommagée.
– Ayant démarré les appareils dès 13h, heure prévue, la carte mémoire de l’appareil photo des prises de vues verticales s’est trouvée pleine plus tôt que prévu, nous n’avons donc pas eu toutes les photos souhaitées y compris celle de la chute.
– Concernant les caméras, nous avons eu un problème de gestion des cartes mémoire.
– Dans la précipitation, ce n’est pas le bon système Arduino qui a été installé dans la nacelle, la programmation n’était pas la bonne, nous n’avons donc pas de données. Il faudra être plus vigilant et il serait plus prudent que le matériel soit prêt la veille.
– Afin de ne pas perdre de temps le jour du lâcher, il faudra que les plans mécanique et électrique soient prêts la semaine précédente.
– Il faudra procéder aux essais des cartes mémoires dans chaque appareil et sur un temps équivalent à la durée de vol.
– Il faudra prévoir un élève chargé de lancer le chronométrage du temps de vol.
– Il faudra prévoir deux élèves chargés du reportage de la journée.
– La nacelle ne devra être fermée que quelques minutes avant sa fixation à la chaîne de vol et donc ne démarrer les appareils qu’au dernier moment, il faudra prévoir un parasol en cas de plein soleil afin de bien voir et vérifier les différentes mise en marche, et donc deux élèves pour ce poste.
– Il faut prévoir de régler la date et l’heure sur les appareils.
– Il faudra remettre en place l’expérience sur les graines.
– Nous devrons être encore plus performants sur la communication interne.
– Le service de sécurité devra être plus visible, avec des gilets fluo jaunes, ils n’ont pas été portés cette année, l’équipe de lâcher aura des gilets orange, et les autres élèves auront des
T-shirt blancs, tous devront porter le logo, le nom du projet et du ballon, et le slogan.
– Le système lumineux et sonore, pour aider à la récupération, devra être mis en marche en différé par un Arduino nano.
– Nous devons résoudre le problème de GPS
– Bien que nous ayons reçu toutes les données, il faut étudier la possibilité d’équiper l’antenne d’un pré amplificateur.
– Les élèves doivent scrupuleusement respecter les consignes, ainsi que les tâches et les postes qui leurs sont attribués.
– Un plan de la cours sera fait avec les différents postes : Zone de lâcher, sécurité et les prises de vues.
– En ne dépassant pas la masse totale maximale autorisée, l’alimentation sera la suivante :
2 piles de 4.5V en série, soit 9V pour l’émetteur Kiwi
2 piles de 4.5V en série, soit 9V pour les Arduino
2 piles de 4.5V en dérivation pour les appareils photos et caméras
1 pile de 9V pour le système lumineux et sonore d’aide à la récupération,
– Pour alléger la nacelle nous abandonnons le capteur de pression mécanique et son compartiment étanche au profit d’un capteur électronique.
– Il faut prévoir une étude de consommation des différents appareils.
– Il faut essayer d’afficher les données en temps réel, sous forme graphique, sur tous les postes su réseau.
– Afin de faciliter la mise en place du matériel dans la nacelle, il faut étudier la possibilité de la construire en deux parties facilement emboîtables.
Nous intégrerons tous ces points à surveiller et/ou à résoudre dans le cahier des charges pour l’année prochaine.